 Researchers developed a first-of-its-kind, plant-inspired extrusion process that enables synthetic material growth.
Researchers developed a first-of-its-kind, plant-inspired extrusion process that enables synthetic material growth.
Sep 28th, 2022
Read more
 Scientists explore how AI affects the tasks performed by humans, their daily work routine, possibly also their professional self-perception and thus their satisfaction in the workplace.
Scientists explore how AI affects the tasks performed by humans, their daily work routine, possibly also their professional self-perception and thus their satisfaction in the workplace.
Sep 27th, 2022
Read more
 Researchers develop an application capable of substantially increasing the number of transactions per minute in blockchains.
Researchers develop an application capable of substantially increasing the number of transactions per minute in blockchains.
Sep 26th, 2022
Read more
 Researchers trained a machine learning tool to capture the physics of electrons moving on a lattice using far fewer equations than would typically be required, all without sacrificing accuracy.
Researchers trained a machine learning tool to capture the physics of electrons moving on a lattice using far fewer equations than would typically be required, all without sacrificing accuracy.
Sep 26th, 2022
Read more
 A review paper discussed possible benefits of using humanoid musculoskeletal robots and soft robotic systems as bioreactor platforms in producing clinically useful tendon constructs.
A review paper discussed possible benefits of using humanoid musculoskeletal robots and soft robotic systems as bioreactor platforms in producing clinically useful tendon constructs.
Sep 23rd, 2022
Read more
 Researchers have installed electronic 'brains' on solar-powered robots that are 100 to 250 micrometers in size - smaller than an ant's head - so that they can walk autonomously without being externally controlled.
Researchers have installed electronic 'brains' on solar-powered robots that are 100 to 250 micrometers in size - smaller than an ant's head - so that they can walk autonomously without being externally controlled.
Sep 22nd, 2022
Read more
 We speak different languages and so do electronic systems. The Semantic Interoperability Framework will assure interoperability.
We speak different languages and so do electronic systems. The Semantic Interoperability Framework will assure interoperability.
Sep 21st, 2022
Read more
 Researchers have harnessed the self-organization skills required to reap the benefits of natural swarms for robotic applications in artificial intelligence, computing, search and rescue, and much more.
Researchers have harnessed the self-organization skills required to reap the benefits of natural swarms for robotic applications in artificial intelligence, computing, search and rescue, and much more.
Sep 21st, 2022
Read more
 Researchers have created an open-source, commercially available fiber extruder to benefit future research with hydrogels and soft robotics.
Researchers have created an open-source, commercially available fiber extruder to benefit future research with hydrogels and soft robotics.
Sep 17th, 2022
Read more
 A new study highlights how deep-network models take potentially dangerous 'shortcuts' in solving complex recognition tasks.
A new study highlights how deep-network models take potentially dangerous 'shortcuts' in solving complex recognition tasks.
Sep 17th, 2022
Read more
 Researchers have developed an AI that appropriately detects and responds to human laughter at a shared moment during a conversation.
Researchers have developed an AI that appropriately detects and responds to human laughter at a shared moment during a conversation.
Sep 15th, 2022
Read more
 Researchers have developed a soft, biodegradable, magnetic millirobot inspired by the walking and grabbing capabilities of insects.
Researchers have developed a soft, biodegradable, magnetic millirobot inspired by the walking and grabbing capabilities of insects.
Sep 14th, 2022
Read more
 One of the challenges of intelligent computer programmes - agents - is that they need to recognize and express intentions.
One of the challenges of intelligent computer programmes - agents - is that they need to recognize and express intentions.
Sep 14th, 2022
Read more
 Researchers developed a novel approach for comparing neural networks that looks within the 'black box' of artificial intelligence to help researchers understand neural network behavior.
Researchers developed a novel approach for comparing neural networks that looks within the 'black box' of artificial intelligence to help researchers understand neural network behavior.
Sep 13th, 2022
Read more
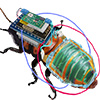 Researchers have engineered a system for creating remote controlled cyborg cockroaches, equipped with a tiny wireless control module that is powered by a rechargeable battery attached to a solar cell. This achievement will help make the use of cyborg insects a practical reality.
Researchers have engineered a system for creating remote controlled cyborg cockroaches, equipped with a tiny wireless control module that is powered by a rechargeable battery attached to a solar cell. This achievement will help make the use of cyborg insects a practical reality.
Sep 5th, 2022
Read more
 Can we use machine learning methods to predict the sensing data of odor mixtures and design new smells? A new study does just that.
Can we use machine learning methods to predict the sensing data of odor mixtures and design new smells? A new study does just that.
Sep 5th, 2022
Read more
 Artificial intelligence (AI) can be trained to recognise whether a tissue image contains a tumour. However, exactly how it makes its decision has remained a mystery until now.
Artificial intelligence (AI) can be trained to recognise whether a tissue image contains a tumour. However, exactly how it makes its decision has remained a mystery until now.
Sep 2nd, 2022
Read more
 A new algorithm could lead to pivotal discovery of new materials for solar cells.
A new algorithm could lead to pivotal discovery of new materials for solar cells.
Sep 1st, 2022
Read more
 Subscribe to our Robotics, AI & SmartTech News feed
Subscribe to our Robotics, AI & SmartTech News feed