 Inspired by the mastery of artificial intelligence (AI) over games like Go and Super Mario, scientists trained an AI agent - an autonomous computational program that observes and acts - how to conduct research experiments at superhuman levels by using the same approach.
Inspired by the mastery of artificial intelligence (AI) over games like Go and Super Mario, scientists trained an AI agent - an autonomous computational program that observes and acts - how to conduct research experiments at superhuman levels by using the same approach.
Mar 26th, 2021
Read more
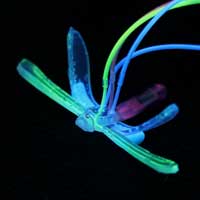 Electronics-free DraBot uses air pressure, microarchitectures and self-healing hydrogels to watch for changes in pH, temperature and oil.
Electronics-free DraBot uses air pressure, microarchitectures and self-healing hydrogels to watch for changes in pH, temperature and oil.
Mar 26th, 2021
Read more
 Scientists are investigating how roads could be reinforced with simple means and recycled easily after use. Their tools are a robot and a few meters of string.
Scientists are investigating how roads could be reinforced with simple means and recycled easily after use. Their tools are a robot and a few meters of string.
Mar 23rd, 2021
Read more
 Deep-learning technique optimizes the arrangement of sensors on a robot?s body to ensure efficient operation.
Deep-learning technique optimizes the arrangement of sensors on a robot?s body to ensure efficient operation.
Mar 22nd, 2021
Read more
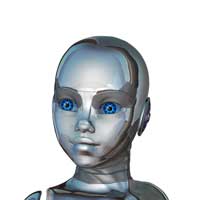
 Researchers study the expressiveness of android faces using motion capture cameras and identify ways in which they still lack the complexity of real human reactions, which may help guide future robot design.
Researchers study the expressiveness of android faces using motion capture cameras and identify ways in which they still lack the complexity of real human reactions, which may help guide future robot design.
Mar 22nd, 2021
Read more
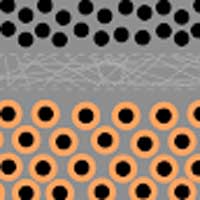
 Researchers created micron-sized robots that could enable locomotion, novel metamaterial design and high-fidelity sensors.
Researchers created micron-sized robots that could enable locomotion, novel metamaterial design and high-fidelity sensors.
Mar 19th, 2021
Read more
 This is the first quadruped robot that is able to automatically adapt its morphology to different conditions in unstructured outdoor environments.
This is the first quadruped robot that is able to automatically adapt its morphology to different conditions in unstructured outdoor environments.
Mar 16th, 2021
Read more
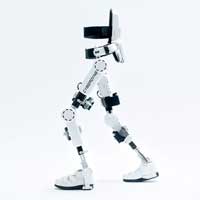 Robotics researchers are developing exoskeletons and prosthetic legs capable of thinking and moving on their own using sophisticated artificial intelligence (AI) technology.
Robotics researchers are developing exoskeletons and prosthetic legs capable of thinking and moving on their own using sophisticated artificial intelligence (AI) technology.
Mar 15th, 2021
Read more
 Researchers develop a new rechargeable zinc battery that integrates into the structure of a robot to provide much more energy. The battery membrane is a nano-material based on cartilage, using recycled Kevlar.
Researchers develop a new rechargeable zinc battery that integrates into the structure of a robot to provide much more energy. The battery membrane is a nano-material based on cartilage, using recycled Kevlar.
Mar 12th, 2021
Read more
 A crucial question for practical applications is how fast intelligent machines can learn. An experiment has answered this question, showing that quantum technology enables a speed-up in the learning process.
A crucial question for practical applications is how fast intelligent machines can learn. An experiment has answered this question, showing that quantum technology enables a speed-up in the learning process.
Mar 11th, 2021
Read more
 Researchers published results of experiments in which robots led a Swedish word game with individuals whose proficiency in the Nordic language was varied. They found that by redirecting its gaze to less proficient players, a robot can elicit involvement from even the most reluctant participants.
Researchers published results of experiments in which robots led a Swedish word game with individuals whose proficiency in the Nordic language was varied. They found that by redirecting its gaze to less proficient players, a robot can elicit involvement from even the most reluctant participants.
Mar 10th, 2021
Read more
 One thousand newly-minted microrobots will soon be deployed at two large-scale telescopes in Chile and the United States. These high-precision instruments, capable of positioning optical fibers to within a micron, will vastly increase the quantity of astrophysics data that can be gathered - and expand our understanding of the Universe.
One thousand newly-minted microrobots will soon be deployed at two large-scale telescopes in Chile and the United States. These high-precision instruments, capable of positioning optical fibers to within a micron, will vastly increase the quantity of astrophysics data that can be gathered - and expand our understanding of the Universe.
Mar 5th, 2021
Read more
 New type of control system may broaden robots' range of tasks and allow safer interactions with people.
New type of control system may broaden robots' range of tasks and allow safer interactions with people.
Mar 3rd, 2021
Read more
 A robotic gripper with the sensor mounted at the fingertip could accomplish challenging tasks such as stably grasping fragile objects and threading a needle.
A robotic gripper with the sensor mounted at the fingertip could accomplish challenging tasks such as stably grasping fragile objects and threading a needle.
Mar 1st, 2021
Read more
 Engineers have created a four-legged soft robot that only needs a constant source of pressurized air for all its functions, including its controls and locomotion systems.
Engineers have created a four-legged soft robot that only needs a constant source of pressurized air for all its functions, including its controls and locomotion systems.
Feb 18th, 2021
Read more
 Service robots can help ensure that buildings and means of transport are cleaned and disinfected regularly and with consistently high quality.
Service robots can help ensure that buildings and means of transport are cleaned and disinfected regularly and with consistently high quality.
Feb 12th, 2021
Read more
 A team of researchers has created a soft robot inspired by the quick and agile brittle star, the first mobile and untethered underwater crawling robot.
A team of researchers has created a soft robot inspired by the quick and agile brittle star, the first mobile and untethered underwater crawling robot.
Feb 12th, 2021
Read more
 Innovators developed and are testing a novel construction robotic system that uses an innovative mechanical design with advances in computer vision sensing technology to work in a construction setting.
Innovators developed and are testing a novel construction robotic system that uses an innovative mechanical design with advances in computer vision sensing technology to work in a construction setting.
Feb 10th, 2021
Read more
 Subscribe to our Robotics, AI & SmartTech News feed
Subscribe to our Robotics, AI & SmartTech News feed