Showing Spotlights 57 - 64 of 624 in category All (newest first):
 Researchers develop a simple technique for producing 3D porous fiber materials directly from solutions using a standard electrospinning setup, opening doors for customized insulation, absorbents, scaffolds, electrodes.
Researchers develop a simple technique for producing 3D porous fiber materials directly from solutions using a standard electrospinning setup, opening doors for customized insulation, absorbents, scaffolds, electrodes.
Sep 11th, 2023
 Researchers develop a new biomaterial fabrication technique combining co-extrusion and 3D printing to produce scaffolds with nanoscale layers, improving cardiomyocyte growth and function.
Researchers develop a new biomaterial fabrication technique combining co-extrusion and 3D printing to produce scaffolds with nanoscale layers, improving cardiomyocyte growth and function.
Aug 29th, 2023
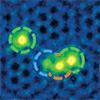 Researchers develop novel technique combining top-down electron beam control with bottom-up atomic self-assembly, enabling major advancements in automated, reproducible atomic-scale manufacturing.
Researchers develop novel technique combining top-down electron beam control with bottom-up atomic self-assembly, enabling major advancements in automated, reproducible atomic-scale manufacturing.
Aug 11th, 2023
 Researchers develop fully recyclable, self-healing soft robots made of a novel dynamic polymer, enabling rapid wireless reprogramming and reshaping into new functions. The material overcomes previous challenges in recyclability for sustainable soft robotics.
Researchers develop fully recyclable, self-healing soft robots made of a novel dynamic polymer, enabling rapid wireless reprogramming and reshaping into new functions. The material overcomes previous challenges in recyclability for sustainable soft robotics.
Aug 4th, 2023
 Researchers develop revolutionary buckling metamaterials that leverage elastic instabilities to achieve extreme vibration damping, enabling lightweight yet stiff structures. The materials set hard limits on vibration transmission regardless of input acceleration.
Researchers develop revolutionary buckling metamaterials that leverage elastic instabilities to achieve extreme vibration damping, enabling lightweight yet stiff structures. The materials set hard limits on vibration transmission regardless of input acceleration.
Aug 2nd, 2023
 Researcheres have developed a groundbreaking method for high-throughput mechanical exfoliation, enabling low-cost production of van der Waals nanosheets. The technique offers a significant advancement in the scalable fabrication of low-cost devices while maintaining excellent performance.
Researcheres have developed a groundbreaking method for high-throughput mechanical exfoliation, enabling low-cost production of van der Waals nanosheets. The technique offers a significant advancement in the scalable fabrication of low-cost devices while maintaining excellent performance.
Jun 29th, 2023
 Researchers are advancing high-density memory storage with an innovative method to form block copolymer structures. By pushing boundaries with unique tetragonally packed inverted cylinders, these novel structures bring us one step closer to ultra-compact future memory devices.
Researchers are advancing high-density memory storage with an innovative method to form block copolymer structures. By pushing boundaries with unique tetragonally packed inverted cylinders, these novel structures bring us one step closer to ultra-compact future memory devices.
Jun 28th, 2023
 Comprehensive analysis of nanocellulose as a promising component in the development of advanced flexible materials. Emphasizes potential applications in electronics, energy storage, and biomedicine, and investigates the challenges and future perspectives in the field.
Comprehensive analysis of nanocellulose as a promising component in the development of advanced flexible materials. Emphasizes potential applications in electronics, energy storage, and biomedicine, and investigates the challenges and future perspectives in the field.
May 16th, 2023
 Subscribe to our Nanotechnology Spotlight feed
Subscribe to our Nanotechnology Spotlight feed