| Dec 05, 2012 |
Driverless vehicles expected to navigate intersection of safety, speed
|
|
(Nanowerk News) How do driverless vehicles navigate through intersections? Faster and safer than if humans were in charge, according to researchers from the Virginia Tech Transportation Research.
|
|
Autonomous vehicles will turn themselves over to an automated intersection controller, which will allow the vehicles to move at the speed limit, with the controller tweaking their trajectory to prevent crashes, explained Ismail Zohdy of Cairo, Egypt, a Ph.D. student in civil engineering at Virginia Tech, and Hesham Rakha, director of the Center for Sustainable Mobility at the transportation institute and professor of civil engineering at the university.
|
|
Their research on 'Optimizing Driverless Vehicles at Intersections', presented at the Intelligent Transportation Society World Congress in Vienna, won the Best Scientific Paper Award for North America. ITS also stands for intelligent transportation systems.
|
 |
|
"The paper develops a step-by-step procedure, or algorithm, for managing driverless vehicles through intersections," said Zohdy. "The proposed system considers the vehicles’ location, speed, and acceleration plus the surrounding environment, such as weather and intersection characteristics."
|
|
"The proposed intersection controller, which allows vehicles to keep moving, reduces the delay for each vehicle compared to traditional intersection control," said Rakha. "Keeping vehicles moving is also more fuel efficient and reduces emissions."
|
|
But, with driver behavior considered to be the leading cause of more than 90 percent of accidents, safety is the primary motivation for driverless vehicles. "Somewhere in the future, you will not be driving your car anymore; you will be driven by your car," said Zohdy. "A driverless vehicle can much more accurately judge distances and velocities, and react instantly to situations that could cause an accident due to a delayed human reaction."
|
|
"We are not talking about the distant future," said Rakha. A May 5, 2011, article in the New York Times reported that after the successful test of the Google driverless vehicle, Nevada passed a law that could let self-driving cars on the road as soon as March 1, 2012. This provided the motivation for Zohdy's work on developing innovative optimization algorithms for controlling such vehicles, and the Intelligent Transportation Society's interest.
|
|
"Intelligent transportation systems are an interaction of many complex entities that communicate with each other, such as vehicles, traffic signals, and advisory signs. Driverless vehicles would be capable of interacting with these other entities," said Zohdy.
|
|
"Many such intelligent systems already exist, such as dynamic routing and congestion management, and intelligent traffic control," said Rakha. "Autonomous vehicles are inspired by the research done on robotic control."
|
|
In Zohdy and Rakha's research, the intersection controller governs the vehicles within 200 meters (218.7 yards) from the intersection. The vehicles report their physical characteristics, such as power, mass, speed, location, and acceleration. "The aim of giving complete authority to the controller is to overcome any selfish behavior by an autonomous vehicle and benefit all vehicles in the intersection zone," said Zohdy. "The controller determines the optimum speed and acceleration at each time step for every vehicle within the intersection zone by processing the input data through a real-time simulator/tool, as shown using YouTube."
|
|
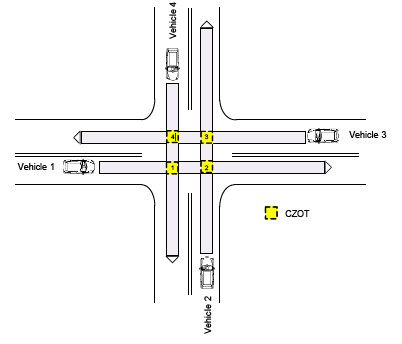
The research was done based on a four-way intersection with one vehicle entering from each direction and moving straight through. It has since been expanded and tested on more congested intersections involving not fully deployed systems and comparing this type of control to traffic signal and roundabout control. “We were testing it if only 10 percent of the vehicles were automated and the other 90 percent were regular vehicles with driver control. We varied the level of automation from 10 to 100 percent at 10 percent increments,” said Rakha. This effort has resulted in two papers that will be presented that the Transportation Research Board Annual Meeting in January 2013.
|
|
Zohdy and Rakha will also be testing their system on a roundabout on the Virginia Tech campus as part of the Connected Vehicle/Infrastructure University Transportation Center.
|