| Sep 15, 2014 |
Cheetah-bot - bound for robotic glory (w/video)
|
|
(Nanowerk News) Speed and agility are hallmarks of the cheetah: The big predator is the fastest land animal on Earth, able to accelerate to 60 mph in just a few seconds. As it ramps up to top speed, a cheetah pumps its legs in tandem, bounding until it reaches a full gallop.
|
|
Now MIT researchers have developed an algorithm for bounding that they’ve successfully implemented in a robotic cheetah — a sleek, four-legged assemblage of gears, batteries, and electric motors that weighs about as much as its feline counterpart. The team recently took the robot for a test run on MIT’s Killian Court, where it bounded across the grass at a steady clip.
|
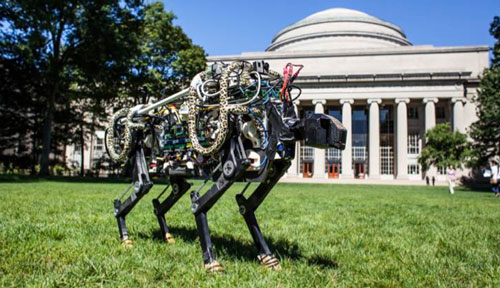 |
| The MIT cheetah-bot in Killian Court
|
|
In experiments on an indoor track, the robot sprinted up to 10 mph, even continuing to run after clearing a hurdle. The MIT researchers estimate that the current version of the robot may eventually reach speeds of up to 30 mph.
|
|
The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground, in order to maintain a given speed: In general, the faster the desired speed, the more force must be applied to propel the robot forward. Sangbae Kim, an associate professor of mechanical engineering at MIT, hypothesizes that this force-control approach to robotic running is similar, in principle, to the way world-class sprinters race.
|
|
“Many sprinters, like Usain Bolt, don’t cycle their legs really fast,” Kim says. “They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.”
|
|
Kim says that by adapting a force-based approach, the cheetah-bot is able to handle rougher terrain, such as bounding across a grassy field. In treadmill experiments, the team found that the robot handled slight bumps in its path, maintaining its speed even as it ran over a foam obstacle.
|
|
“Most robots are sluggish and heavy, and thus they cannot control force in high-speed situations,” Kim says. “That’s what makes the MIT cheetah so special: You can actually control the force profile for a very short period of time, followed by a hefty impact with the ground, which makes it more stable, agile, and dynamic.”
|
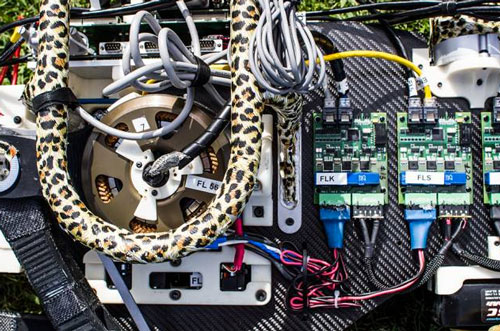 |
| The custom, high-torque-density motors and amplifier.
|
|
Kim says what makes the robot so dynamic is a custom-designed, high-torque-density electric motor, designed by Jeffrey Lang, the Vitesse Professor of Electrical Engineering at MIT. These motors are controlled by amplifiers designed by David Otten, a principal research engineer in MIT’s Research Laboratory of Electronics. The combination of such special electric motors and custom-designed, bio-inspired legs allow force control on the ground without relying on delicate force sensors on the feet.
|
|
Kim and his colleagues — research scientist Hae-Won Park and graduate student Meng Yee Chuah — will present details of the bounding algorithm this month at the IEEE/RSJ International Conference on Intelligent Robots and Systems in Chicago.
|
|
Toward the ultimate gait
|
|
The act of running can be parsed into a number of biomechanically distinct gaits, from trotting and cantering to more dynamic bounding and galloping. In bounding, an animal’s front legs hit the ground together, followed by its hind legs, similar to the way that rabbits hop — a relatively simple gait that the researchers chose to model first.
|
|
“Bounding is like an entry-level high-speed gait, and galloping is the ultimate gait,” Kim says. “Once you get bounding, you can easily split the two legs and get galloping.”
|
|
As an animal bounds, its legs touch the ground for a fraction of a second before cycling through the air again. The percentage of time a leg spends on the ground rather than in the air is referred to in biomechanics as a “duty cycle”; the faster an animal runs, the shorter its duty cycle.
|
|
See the MIT cheetah-bot in action, and learn how it works:
|
|
|
|
Kim and his colleagues developed an algorithm that determines the amount of force a leg should exert in the short period of each cycle that it spends on the ground. That force, they reasoned, should be enough for the robot to push up against the downward force of gravity, in order to maintain forward momentum.
|
|
“Once I know how long my leg is on the ground and how long my body is in the air, I know how much force I need to apply to compensate for the gravitational force,” Kim says. “Now we’re able to control bounding at many speeds. And to jump, we can, say, triple the force, and it jumps over obstacles.”
|
|
In experiments, the team ran the robot at progressively smaller duty cycles, finding that, following the algorithm’s force prescriptions, the robot was able to run at higher speeds without falling. Kim says the team’s algorithm enables precise control over the forces a robot can exert while running.
|
|
By contrast, he says, similar quadruped robots may exert high force, but with poor efficiency. What’s more, such robots run on gasoline and are powered by a gasoline engine, in order to generate high forces.
|
|
“As a result, they’re way louder,” Kim says. “Our robot can be silent and as efficient as animals. The only things you hear are the feet hitting the ground. This is kind of a new paradigm where we’re controlling force in a highly dynamic situation. Any legged robot should be able to do this in the future.”
|