| Posted: Sep 11, 2007 | |
Hands-on nanotechnology: towards a nanorobotic assembly line |
|
| (Nanowerk Spotlight) Until the twentieth century, a single craftsman or team of craftsmen would normally create each part of an industrial product individually and assemble them together into a single item, making changes in the parts so that they would fit together and work together; the so-called English System of manufacture. Then Henry Ford came along and in 1907-08 developed the assembly line for his Model T automobile. | |
| This innovation revolutionized not only industry but also our society because it allowed mass production of industrial goods at much lower cost than before. At its core, an assembly line is a manufacturing process in which interchangeable parts are added to a product in a sequential manner to create a finished product. | |
| Nanotechnology techniques today are pretty much where the industrial world was before Ford's assembly line - a domain of craftsmen and not of mass production. It has long been a dream for nanotechnologists that robots could one day be used in a similar way to produce nanodevices. | |
| A group of researchers from Denmark and Germany have now developed the rudimentary beginnings of the nanotechnology equivalent of an assembly line. They have shown 'pick-and-place' assembly of a working device using a silicon gripper - a robotic 'hand' some 10000 times smaller than a human hand. This nanogripper, controlled by a nanorobotic arm, is capable of picking up a carbon nanofiber (CN) and fix it onto the tip of an atomic force microscope cantilever. | |
| "We managed to break off a sturdy carbon nanofiber, mount it at the pyramidal tip of an atomic force cantilever and used it for scanning in a deep groove" Dr. Peter Bøggild explains to Nanowerk. "Now, people have made sharp tipped AFMs before, but this is the first time - we think - a dedicated nanotool has literally snapped off a nanotube from a fixed position and mounted it as a device component - and tested that the device worked." | |
 |
|
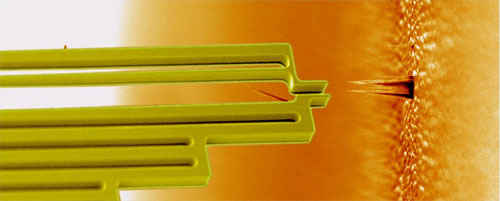
| The gripper and a bundle of carbon fibers (Image: Volkmar Eichhorn, University of Oldenburg). | |
| Bøggild is an Associate Professor and leader of the Nanointegration Group at the Department of Micro and Nanotechnology at the Technical University of Denmark (DTU). Together with colleagues from the Division Microrobotics and Control Engineering, University of Oldenburg, led by Prof. Sergej Fatikow, he published a recent paper in Nanotechnology demonstrating the full process flow for the assembly of a simple device, which can be automated in the future ("A carbon nanofibre scanning probe assembled using an electrothermal microgripper"). The nanotubes used for the experiments were grown by researchers in the Department of Engineering at the University of Cambridge. | |
| "What we have demonstrated so far is the basic construction of a working device using a small silicon gripper" says Bøggild. "To turn this into an automatic process we must improve everything: the shape and size of the gripper, the speed and precision of the robot... but now we have a tool that does it job." | |
| Bøggild's work is done in collaborations with two EU projects – NanoHand and NANORAC – gathering the top European laboratories and hi-tech companies in robotics, nanomanipulation, microscopy and nanofabrication to realize a first shot at a nanomanufacturing assembly line before 2009. | |
| How does the gripper work? Parts of the silicon gripper are heated up with an electrical current, and the thermal expansion is converted into a powerful gripping action of the jaws. The distance of the jaws can then be reduced from about 3 micron to zero. The gripper, developed by researchers at DTU, is a part of an advanced nanorobotic system with integrated 3D electron microscopy and image recognition, constructed by Research Associate Volkmar Eichhorn and colleagues at University of Oldenburg. Fatikow is confident that such type of nanorobotic system is the most promising approach towards rapid prototyping of future nanodevices.? | |
| So far carbon nanotubes and nanofibers with diameters down to 100 nm have been manipulated, but in two years smaller tools will manipulate 10-20 nm wide wires and tubes. There are many problems to solve to reach this goal, however. On the nanoscale, 3D manipulation is painstakingly difficult: the robotic arms must work with extreme precision, and real-time imaging of nanostructures is just about possible. Creating the tiny 'hands' for the robot is a great challenge: the fingers must be thin and flexible, and yet have sufficient strength to break off nanotubes from their initial position. Finally, the powerful surface forces on the nanoscale make all objects sticky. | |
| Bøggild has put up a website dedicated to the nanogripper and a video that shows how the nanogripper works is available on YouTube: | |
| To demonstrate their process, the researchers grew CNs in an ordered array with well known positions, dimensions and direction, which makes it possible for a robotic system to locate, detach, move, position and fix a nanostructure on an AFM probe or another device inside an SEM with little or no supervision. | |
| "While automated manipulation using tools such as microgrippers will remain a slow process in comparison to catalytic growth of CNs directly on the target device, mechanical manipulation does offer a great deal of flexibility in terms of prototyping: pick and place can be done entirely as a post-process, i.e. on a finished device, allowing a wide range of sizes, shapes and materials of the nanostructures to be positioned precisely onto nanodevices, which is ideal for rapid prototyping" says Bøggild. | |
 By
Michael
Berger
– Michael is author of three books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology,
Nanotechnology: The Future is Tiny, and
Nanoengineering: The Skills and Tools Making Technology Invisible
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of three books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology,
Nanotechnology: The Future is Tiny, and
Nanoengineering: The Skills and Tools Making Technology Invisible
Copyright ©
Nanowerk LLC
|
Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.