| Jun 28, 2013 |
Robot navigation: Fulfilling tasks for assisting human life
|
|
(Nanowerk News) Nowadays robots are widely used to help humans to fulfill their jobs. It is common to order robots to go to a variety of places to finish the jobs while the robot examines its surrounding environment.
|
|
However, moving the robot from one place to another in an area with many obstacles and people moving around is not an easy task.
|
|
Here, Igi Ardiyanto and Jun Miura have solved these problems by introducing a novel motion planning algorithm for mobile robots called Heuristic Arrival Time Field-biased (HeAT) Random Tree ("Real-time navigation using randomized kinodynamic planning with arrival time field").
|
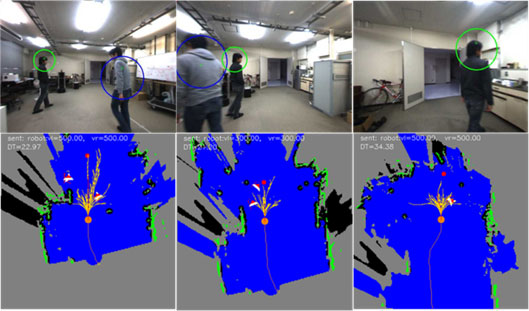 |
| Experiment of the real robot avoiding moving obstacles (persons): (top) detected persons in the real world, (bottom) planned path in local map scene.
|
|
HeAT Random Tree takes advantage of the high-exploration ability of the randomized tree combined with the arrival time field and heuristics. The arrival time field is used to give a bias and guide the randomized tree expansion in a favorable way. Together with heuristics, the arrival time field effectively ensures the robot to choose the path in the tree expansion with a considerable clearance with any obstacle (safety) and has an optimum cost to reach the destination, including the smoothness of the path.
|
|
HeAT Random Tree algorithm is tested in both simulations and experiments with the real robot for waypoint following and person tracking problems. The robustness of algorithm is shown by successful runs rate up to 100 % using maximum speed of 600 mm per second, within 0.5 seconds of computational time.
|
|
These results imply that HeAT Random Tree can act as the robot navigation algorithm in real environments. Furthermore, several possibilities of improvements can be applied for better handling of moving obstacles such as persons, for example, by using a 3D time-space representation.
|