(Nanowerk News) Micrometer-sized robots have great potential for example in medicine, as they may locally deliver drugs or perform accurate surgery. Scientists are therefore looking for ways to develop robots at this miniature scale.
However, when manufacturing ever-smaller versions of functional devices, one quickly encounters limitations. Therefore, Leiden physicist Daniela Kraft works the other way round: bottom-up instead of top-down. She uses particles of around a micrometer—so-called colloids—as parts (Nanoscale, "Colloidal Joints with Designed Motion Range and Tunable Joint Flexibility").
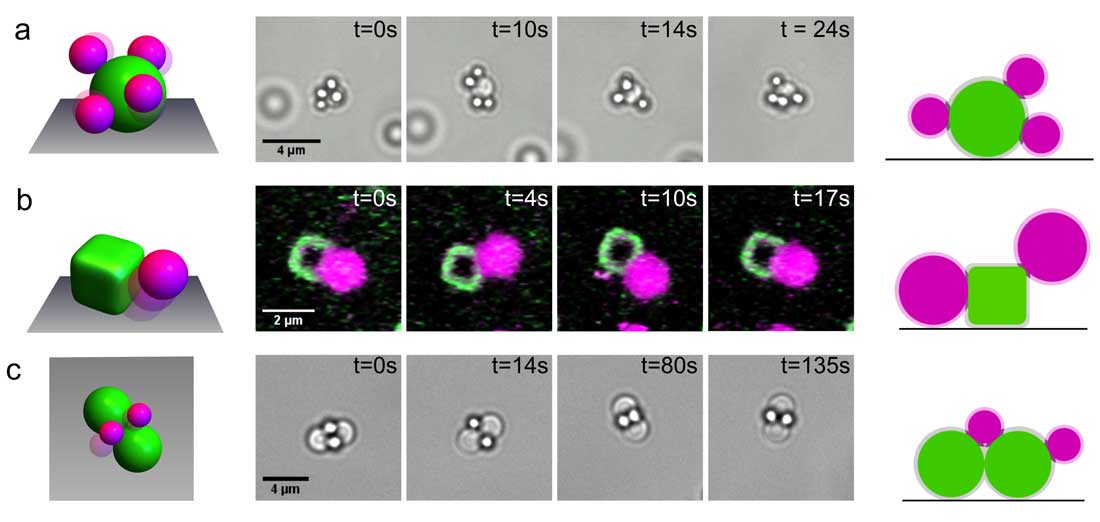
Figure 1: Three different types of micrometer sized joints. a) Ball joints impart freedom of movement over 360 degrees for the purple spheres. b) Sliding joints: the purple sphere can only slide across one side of the cube. c) Hinge joints: the purple spheres can only circle around the center of the dumbbell. (Image: Leiden University) (click on image to enlarge)
Due to their tiny size, colloids have the additional benefit to continuously move in random directions, which allows the structures to build themselves.
Joints
While it is already challenging to create the various parts—such as cubes, triangles, and dumbbells—and combine them in the desired way, the resulting objects are usually rigid. If you dream about creating a fully functional micro-robot, you also need parts that allow movement: joints.
Now for the first time, Kraft and her research group have managed to make three different types of joints at the microscale: hinges, sliders and ball joints. They publish their findings in Nanoscale.
DNA
To give their joints the necessary mobility, the researchers connect the colloids through DNA linkers. Instead of attaching the linkers to a fixed place on the colloid, they freely move across the surface.
Kraft keeps the density relatively low at about a thousand DNA linkers per square micrometer on the colloid surface. That is sufficient to build in the joint functionality, while at the same time not being too many to arrest the system.
Sliding joint, as in figure 1b above.
Degrees of freedom
In the macroscopic world, joints do not only create a mobile connection, they also provide functionality by constraining the motion to certain directions. A door hinge, for example, only allows the door to revolve around one direction.
To impart such specific degrees of freedom and thus functionality to their microscopic joints, the physicists exploited the fact that colloids attach strongest at maximum contact.
A sphere connected to a cubic particle can only slide along its side, because the contact area will diminish if it turns around the corner; this makes it a sliding joint (Figure 1b).
Spheres connected to the waist of a dumbbell can only orbit around the center, as they feel maximum contact if they touch both halves of the dumbbell (Figure 1c). This provides a hinge function.
Thirdly, spherical colloids can be used as ball joints because attached particles have the freedom to move in all directions (Figure 1a).
These three types of microscopic joints transform rigid colloid structures into flexible ones that form the basis for future self-building micro robots.