(Nanowerk News) The Georgia Robotics and Intelligent Systems (GRITS) Lab conducts research in the general area of networked and hybrid control systems, with applications to the control and coordination of mobile robots.
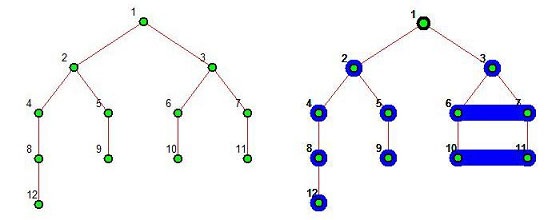
One of their themes is Group-based Leader-Follower Control. The basis of this work is creating application specific leader follower network topologies that are completely controllable. In particular, single leader networks are considered where the input signal is injected at the leader node and the follower nodes execute a nearest neighbor averaging rule.
Under this set up, each network topology can be partitioned into a unique group of follower nodes, where each group converges to a state value that is controllable by the leader node. The challenge, however, lies in building topologies tailored for applications that specify the total number of such groups, as well as the cardinality of each group. The team is currently working on developing low complexity algorithms for building such networks.
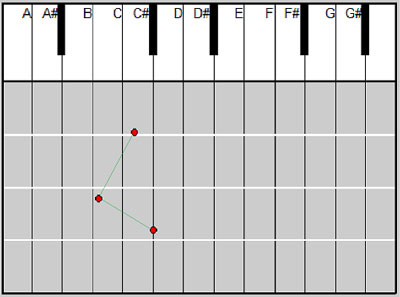
An interesting application of the above mentioned work can be in the field of music. The idea is to simulate a Robot Music Wall, where groups of follower robots will drive around a musically instrumented wall in a coordinated manner, playing different instruments and notes by virtue of their positions on the wall.
The aim is to develop optimal control strategies that will enable the leader robot to successfully drive the followers around, under velocity, acceleration and sensor range constraints, to play a desired musical piece. Currently, GRITS is working on algorithms for ensuring timely and collision free completion of such proposed music trajectories.
An example can be seen in this video:
A swarm of robots (Khepera III) is presented with a musical score (Beethoven's Für Elise) in the form of spatio-temporal requests, i.e. spatial locations that must be reached at specific times (similar to a piano score that requires hitting different piano keys at specific times). By solving the corresponding spatio-temporal routing problem, the smallest possible robot team is deployed in order to effectively "play" the musical score, while minimizing the total distance travelled.