(Nanowerk News) X-RHex is the latest version of the highly mobile RHex platform, designed by Aaron Johnson's Kod*lab at the Unibversity of Pennsylvania. It has greater strength, longer runtime, and more mobility than previous versions, with a modular payload architecture to support a variety of research needs. And now it even can jump.
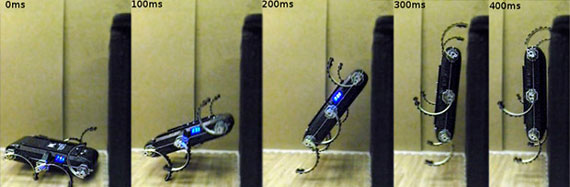
XRL leaping upward onto a 73cm high table,
nearly 1.5 times its bodylength.
With new levels of mobility and durability, and the capability for rapid behavior development with a modular payload system, X-RHex is an effective research machine both in the laboratory and in outdoor field tests. Six powerful motors actuate compliant legs, allowing X-RHex to traverse a wide variety of terrains, including asphalt, grass, sand, mud, and rocks. By using a mil-spec rail mounted interface and standard electrical connections, X-RHex can support a wide variety of payloads, making it a mobile “laboratory on legs”. Now adding an extra sensor or testing a new behavioral algorithm is as easy as on a bench in the lab.
As dynamic robot behaviors become more capable and well understood, the need arises for a wide variety of equally capable and systematically applicable transitions between them.
The team demonstrated their robot ("Toward a Vocabulary of Legged Leaping") during their presentation yesterday at the 2013 IEEE International Conference on Robotics and Automation (ICRA).
Johnson's motivation came from this question: "Leaping is a key transition from rest to a variety of high energy behaviors. It allows us to engage in nearly pure form one of the foundational questions of robotics: how can we program the transfer of energy in a robot’s battery or fuel tank to its mechanical state?"