| Dec 10, 2014 |
Intelligent deep sea robotics |
| (Nanowerk News) Okayama University researchers in collaboration with industrial partners have developed an innovative underwater robot incorporating intelligent three-dimensional object recognition CCD technology for autonomous search and tracking operations over long durations of time in open water. |
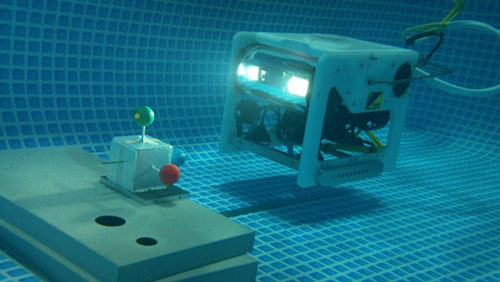 |
| The MOS/AUV underwater robot approaching a target represented by coordinate system with three colored balls. |
| “Our Autonomous Underwater Vehicle (AUV) operates using the combination of our new ‘Move on Sensing’ (MOV) three dimensional visual servo CCD technology with real-time stereopsis and detection of conventional sonar signals,” explains Mamoru Minami, professor at the Graduate School of Natural Science and Technology, Okayama University. “Underwater navigation with this combination of sound and 3-D visual servo feedback enables our AUV to search, track, and pinpoint targets with a precision of 5 mm. We expect this accuracy to improve this figure to 0.5 mm, which we have obtained using ground based robots.” |
| The Okayama University MOS/AUV is expected to find applications in areas including decontamination of radiation contaminated the floors of seas, oceans and lakes; exploration of ocean floors for materials such as methane hydrate and rare earth metals; maintenance of underwater telecommunications cables; environmental monitoring and surveys of marine life; underwater mines; recovering space debris; and lifesaving. |
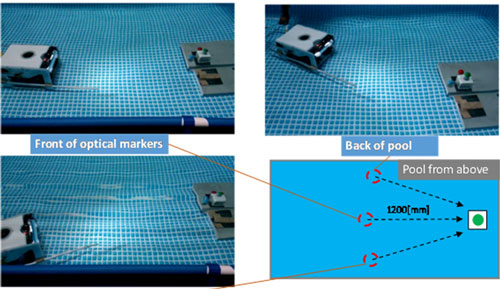 |
| The MOS/AUV robot successfully navigated to the target from different starting points and completed a connecting task of a rod with a tube set beside the 3D marker. |
| The prototype MOS/AUV was tested in an experimental pool of water measuring 2 m long, 3 m wide and x0.75 m deep. The MOS/AUV successfully docked with a target consisting of a hole measuring 7 cm in diameter designed to simulate a recharging base for the robot for simulating charging task of the battery on the AUV. “The two CCD cameras of the MOS visual servo system are located at the front of the robot to track ‘optical induction markers’ emitted by light sources on the target”, says Minami. “We use genetic algorithms (GA) to match the CCD images with 3D models of the target to dock with the target. Ultimately, we do not need to dock to recharge. We could use induction based recharging that we enable much easier operation over long periods of time.” |
| Notably, the robot moves autonomously taking into account changes in the position of the target, with the capability of tracking targets moving at speeds of up to 10 mm/sec. |
| “We can envisage applications not related to underwater activities,” says Minami. “For example docking space vehicles and using autonomous robots to build bases on the Moon. It’s a really exciting invention with many applications.” |
| The MOS/AUV is being developed with Kowa Corporation, a company based in Osaka, Japan, specializing in underwater equipment. |
| Source: Okayama University |

