| Oct 25, 2022 |
Elephant trunk-mimetic robot hand is capable of gripping even fine needles
|
|
(Nanowerk News) A gripper robot has been developed that can grasp all types of objects, from very fine or thin objects such as acupuncture needles and sewing needles to large objects such as boxes.
|
|
The Korea Institute of Machinery and Materials (KIMM) announced that it has developed the world’s first gripper capable of all gripping movements, inspired by elephant trunks. Specifically, it mimics how elephants pick up small objects by pinching them with the tip of their trunks or grip the large objects by sucking in air deeply through their trunks.
|
|
The research team led by Dr. Sung-Hyuk Song, a senior researcher at the Department of Robotics and Mechatronics in the KIMM AI Robot Research Division, developed an elephant trunk-mimetic gripper that can grip object with pinch-suction fusion mechanism using its soft structure, stretchable-thin wall, and wires that allow the gripper to change its shape. The team expects this new technology to be applicable to various fields, for it is not only able to effectively transport various size of objects, but also is capable of gripping and assembling objects in a stable manner, without the use of any complicated mechanical devices or sensors.
|
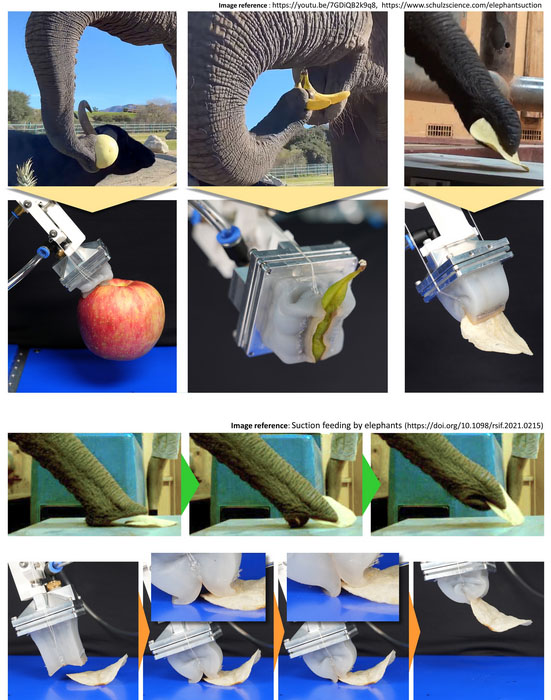 |
| (Upper) Elephant and gripper gripping objects in various sizes and shapes. (Lower) Comparison of an elephant trunk and the gripper gripping potato chips. (Image: Korea Institute of Machinery and Materials)
|
|
The soft structure of the gripper has several micro-channels that create a vacuum inside, helping it attach to an object. Since each of these micro-channels is flexible, it can modify its shape to match that of objects it comes into contact with. Therefore, the soft structure itself functions as a suction gripper by generating adhesive force to surface of objects.
|
|
In addition, by pulling the wires that control the shape of the gripper, located in the center of the soft structure, the gripper can fold in half on itself, which allows for it to be used like a claw gripper, pinching and grasping the objects. When used in this way, the stretchable-thin wall located outside the gripper wraps around and seals the target object. By creating a vacuum inside the gripper after pinching and wrapping around the object, the gripping force can be greatly increased as needed.
|
|
Over the years, the grippers have been developed separately as a claw type or a suction type. Claw-type grippers cannot grasp objects that are larger than the maximum size at which the claw can be opened. Meanwhile, suction-type grippers are capable of gripping objects of various sizes, but struggle when gripping very thin objects such as needles or thread, or objects such as cloth or sponge that the air can pass through.
|
|
The gripper newly developed by KIMM can grip objects of various sizes and materials by simultaneously applying the claw-type and suction-type gripping mechanisms. It is not only capable of gripping small-size objects, such as acupuncture needles (0.25mm in diameter) from the floor, which are smaller than one hundredth the size of the gripper, but it also can grip large-size objects such as boxes that are 10 times its size.
|
|
Also, this gripper can pinch and grasp various objects in claw gripping mode by simply turning on and off the pneumatic cylinder that moves the shape-modifying wires, without any complicated sensors or controls. Dr. Sung-Hyuk Song explained, “After contacting the soft gripper to the floor and then creating a vacuum while conducting a pinching motion, the gripper can grip objects as if you were strongly pinching the floor with your fingers. In this way, even very thin objects can be easily gripped and be lifted from the floor.”
|
|
With the advantages of KIMM’s new technology, the gripper can even conduct complex tasks, such as preparing for a party by wrapping a doll in a gift box, inserting a paper cake topper into the cake, and stably holding matches on the floor to light candles. The gripper can even arrange flowers by grasping the stems of various flowers with atypical shapes lying on the floor.
|
|
Dr. Chanhun Park, the Director of AI Robot Research Division, explained, “Our newly developed elephant trunk-mimetic, pinch-suction fusion gripper, which uses both claw and suction mechanisms, is soft, so there is no risk of injury even when operating it around people. Not only can it handle objects of various sizes, from fine parts to boxes, without complex mechanical structures or sensors, but also it can be handled easily, which means it can be applied to various industries as well as daily life.” He added, “I expect it to be of great help to the development of service robots in daily life and companies that produce a variety of different objects.”
|

