Tiny, shape-shifting robot can squish itself into tight spaces (w/video)
(Nanowerk News) Coming to a tight spot near you: CLARI, the little, squishable robot that can passively change its shape to squeeze through narrow gaps—with a bit of inspiration from the world of bugs.
CLARI, which stands for Compliant Legged Articulated Robotic Insect, comes from a team of engineers at the CU Boulder. It also has the potential to aid first responders after major disasters in an entirely new way.
Several of these robots can easily fit in the palm of your hand, and each weighs less than a Ping Pong ball. CLARI can transform its shape from square to long and slender when its surroundings become cramped, said Heiko Kabutz, a doctoral student in the Paul M. Rady Department of Mechanical Engineering.
Right now, CLARI has four legs. But the machine’s design allows engineers to mix and match its appendages, potentially giving rise to some wild and wriggly robots.
“It has a modular design, which means it’s very easy to customize and add more legs,” Kabutz said. “Eventually, we’d like to build an eight-legged, spider-style robot that could walk over a web.”
CLARI is still in its infancy, added Kaushik Jayaram, co-author of the study and an assistant professor of mechanical engineering at CU Boulder. The robot, for example, is tethered to wires, which supply it with power and send it basic commands. But he hopes that, one day, these petite machines could crawl independently into spaces where no robot has crawled before—like the insides of jet engines or the rubble of collapsed buildings.
“Most robots today basically look like a cube,” Jayaram said. “Why should they all be the same? Animals come in all shapes and sizes.”
Cockroach power
Jayaram is no stranger to robots that reflect the hodgepodge of the animal world.
As a graduate student at the University of California, Berkeley, he designed a robot that could squeeze through narrow spaces by compressing down to about half its height—just like cockroaches wedging their way through cracks in a wall. But that machine, he said, represented just the tip of the iceberg where animal flexibility is concerned.
“We were able to squeeze through vertical gaps,” he said. “But that got me thinking: That’s one way to compress. What are others?”
Which is where CLARI, made to squeeze through horizontal gaps, scuttles into the picture.
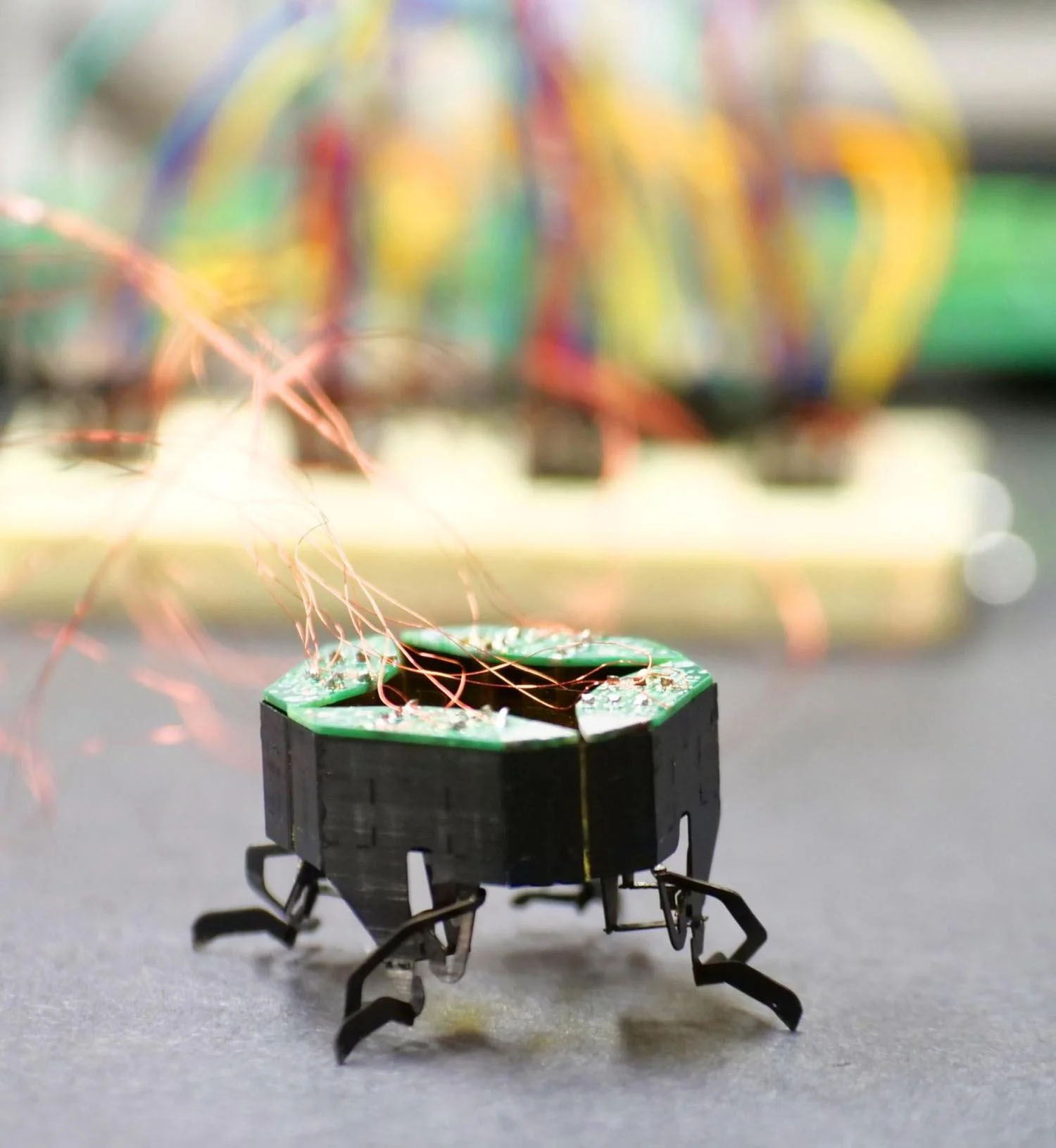
CLARI's modular design could allow researchers to add more legs to this robot, creating a spider-like machine. (Image: Casey Cass/CU Boulder)
In its most basic form, the robot is shaped like a square with one leg along each of its four sides. Depending on how you squeeze CLARI, however, it can become wider, like a crab, or more elongated, like Jayaram’s old favorite, the cockroach. In all, the robot can morph from about 34 millimeters (1.3 inches) wide in its square shape to about 21 millimeters (0.8 inches) wide in its elongated form.
Unlike Jayaram’s earlier mechanized cockroach, each of CLARI’s legs functions almost like an independent robot—with its own circuit board and dual actuators that move the leg forward and backward and side-to-side, similar to a human hip joint. Theoretically, that modularity might allow CLARI robots to take on a wide variety of shapes.
“What we want are general-purpose robots that can change shape and adapt to whatever the environmental conditions are,” Jayaram said. “In the animal world, that might be something like an amoeba, which has no well-defined shape but can change depending on whether it needs to move fast or engulf some food.”
Web crawler
He and Kabutz see their current design as the first in a series of CLARI robots that they hope will become smaller and more nimble.
In future iterations, the researchers want to incorporate sensors into CLARI so that it can detect and react to obstacles. The group is also examining how to give the robot the right mix of flexibility and strength, Kabutz said—a task that will only get more difficult the more legs the team adds on.
Ultimately, the team wants to develop shape-changing robots that don’t just move through a lab environment but a complex, natural space—in which the machines will need to bounce off obstacles like trees or even blades of grass or push through the cracks between rocks and keep going.
“When we try to catch an insect, they can disappear into a gap,” Kabutz said. “But if we have robots with the capabilities of a spider or a fly, we can add cameras or sensors, and now we’re able to start exploring spaces we couldn’t get into before.”
Source: By Daniel Strain, University of Colorado Boulder (Note: Content may be edited for style and length)