| Sep 10, 2013 |
Cyborg astrobiologist uses phone-cam to search for signs of life
|
|
(Nanowerk News) A novel, hybrid part-human, part-machine visual system that uses a simple mobile phone camera has been developed to search for evidence of past or present life in planetary analogue sites on Earth. Patrick McGuire from the Freie Universität, Berlin, will present results from this Cyborg Astrobiologist at the European Planetary Science Congress in London on Monday 9th September.
|
|
Members of McGuire's team, which include researchers from the Freie Universität, West Virginia University, the Centro de Astrobiología in Madrid and the University of Malta have been working for over a decade towards giving more scientific autonomy to robotic rovers in choosing the most promising sites for geological and astrobiological investigation. In the Cyborg Astrobiologist system, initially the human astrobiologist takes images of his/her surroundings using a mobile phone camera. These images are sent to via Bluetooth to a laptop, which processes the images to detect novel colours and textures and communicates back to the astrobiologist the degree of similarity to previous images stored in the database.
|
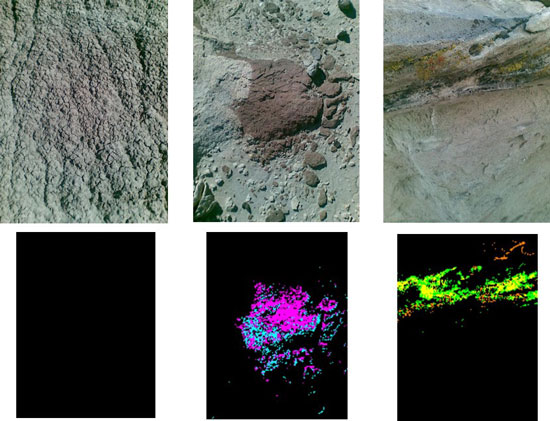 |
| Results from the 2009 tests of the Cyborg Astrobiologist’s novelty detection system with the Bluetooth-enabled Phone-cam in Utah. (Left to Right): The 31st image was completely dull and familiar from a color point of view, so the novelty map was empty.The 40th image had a mudstone of dark brown color, which was the first time this color had been observed during these tests. Hence the dark brown mudstone was judged as novel in the novelty map.The 53rd image had some yellow and orange and green lichens in it, which the Hopfield neural network had no problem in deciding that they were novel features. (Credit: P.C. McGuire, L. Wendt, C. Gross, A. Bonnici/Freie Universität Berlin,/CSIC-INTA/U. Malta/U. Chicago)
|
|
"Over the years, our system has shrunk down from a camera on a tripod and wearable computer, to a small laptop and a phone-cam," said McGuire. "We are now working to speed up the image compression analysis and put the whole system onto a Smartphone – and eventually onto a Mars rover!"
|
|
The robotic rovers currently exploring Mars are heavily reliant on guidance from scientists back on Earth to detect areas that are most interesting for further analysis. The time delay in transmitting and receiving the commands can take between 4 and 24 minutes depending on the relative positions of Earth and Mars on their orbital paths. Exploration would be speeded up significantly if the rovers could identify autonomously unusual colours and textures created by geochemical or biological processes that may be a sign of past or present life.
|
|
Tests of the Cyborg Astrobiologist system have been conducted at field sites with similarities to landscapes that are found on Mars, imaging gypsum cliffs, red-bed sandstones, limestones, mudstones and coalbeds. Some rocks have been partly covered with lichen, a life-form that can possibly spread to/from other planets. Matching images with similar features in images from the database has been very successful.
|
|
"In our most recent tests at a former coal mine in West Virginia, the similarity-matching by the computer agreed with the judgement of our human geologists 91% of the time. The novelty detection also worked well, although there were some issues in differentiating between features that are similar in colour but different in texture, like yellow lichen and sulphur-stained coalbeds. However, for a first test of the technique, it looks very promising," said McGuire. These results of the Cyborg Astrobiologist’s field-work in West Virginia are currently under review for publication by the International Journal of Astrobiology.
|

