| Mar 27, 2014 |
IPAnema - cable-driven robot for intralogistics |
| (Nanowerk News) Their very large workspaces, good mobility and high payload capacity allow cable-driven robots to meet high requirements. Developed by Fraunhofer IPA, the IPAnema cable-driven robot is an innovative robot system featuring state-of-the-art control techniques and proven components. At Automatica 2014, scientists from Fraunhofer IPA will present a comprehensive overview of the strengths and application areas of this new robot technology for inspection, manipulation and assembly. |
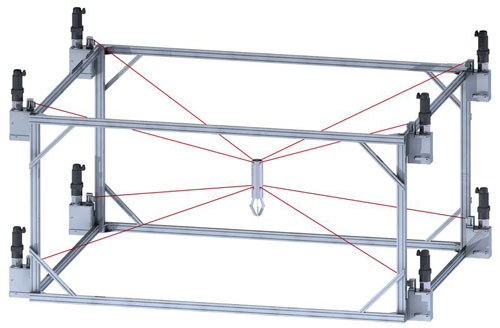 |
| Schematic diagram of the IPAnema parallel cable-driven robot: the end effector is controlled and moved by eight cables. (©: Fraunhofer IPA) |
| With its eight cables and moving platform instead of large articulated-arm robots and area gantries, the platform with grippers appears at first sight to fly through the air. Yet if one tries to move the platform, it refuses to budge. No evasive action, no moving backwards and forwards – instead there is lightweight construction in perfection. Fraunhofer IPA is developing and testing an entirely new approach to the automation of materials handling using robots. IPAnema uses cables that are driven by a number of winches and move an end effector in three dimensions. This new robot kinematics allows free and fully controllable motion. |
| Cable robots are superior to conventional industrial robots by between one and two orders of magnitude in terms of payload capacity and workspace area. Energy-efficient, cost-effective and modular, they make mobile handling and assembly systems a possibility. “Cable robots can be used to automate production and handling tasks that cannot be performed by conventional robots for technical or economic reasons. Very short cycle times are possible in the case of small payloads. Cables can transmit the drive forces almost without loss to the mobile robot platform,” explains Andreas Pott from the Robot and Assistive Systems department at Fraunhofer IPA. |
| Areas of application |
| With its IPAnema cable-driven robot, Fraunhofer IPA offers a technologically novel approach to efficient and flexible handling. The robot can easily be adapted to meet the particular requirements of an application. Payload, workspace and cycle time can be tailored to the relevant task, allowing the robot to operate with maximum efficiency. |
| With many users expressing the wish for the high picking performance of delta robots to be extended to larger components or longer transport distances, cable robots are in a position to set new standards in picking and placing. In addition, they are capable of loading racks with small parcels. If equipped with crane winches, cable robot technology can also be employed to handle loads weighing several tonnes. Similar to the cable cameras for sporting broadcasts, cable robots are designed for use in manufacturing facilities, where they are suitable for the automation of production processes involving very large components, such as wind turbine rotor blades, aircraft fuselages, ships’ hulls or large weldments. Cable robots can serve to position and move the tool that is then used for lamination, grinding, polishing, cleaning or spray-painting. |
| At Automatica 2014, Fraunhofer IPA will present applications of this new robot technology in the areas of inspection, handling and assembly. “Our special focus is on system manufacturers and system integrators of robotics, automation and intralogistics. The technologies developed at Fraunhofer can be used to collaboratively implement new projects and develop innovative products,” says Pott. |
| Source: Fraunhofer-Institut für Produktionstechnik und Automatisierung |

