| Feb 12, 2024 |
Darting around with a tiny brain
|
|
(Nanowerk News) With a brain the size of a pinhead, insects perform fantastic navigational feats. They avoid obstacles and move through small openings. How do they do this, with their limited brain power? Understanding the inner workings of an insect’s brain can help us in our search towards energy-efficient computing, physicist Elisabetta Chicca of the University of Groningen demonstrates with her most recent result: a robot that acts like an insect.
|
|
The findings are published in Nature Communications ("Finding the gap: neuromorphic motion-vision in dense environments").
|
|
It’s not easy to make use of the images that come in through your eyes, when deciding what your feet or wings should do. A key aspect here is the apparent motion of things as you move. ‘Like when you’re on a train’, Chicca explains. ‘The trees nearby appear to move faster than the houses far away. Insects use this information to infer how far away things are. This works well when moving in a straight line, but reality is not that simple.
|
|
Moving in curves makes the problem too complex for insects. To keep things manageable for their limited brainpower, they adjust their behaviour: they fly in a straight line, make a turn, then make another straight line. Chicca explains: ‘What we learn from this is: if you don’t have enough resources, you can simplify the problem with your behaviour.’
|
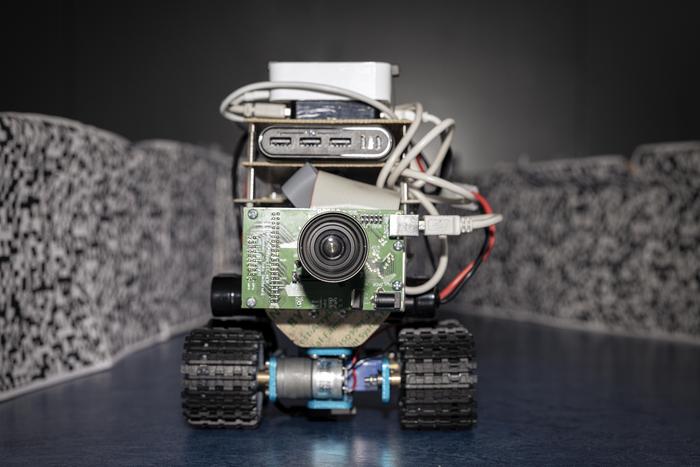 |
| A robot built by Elisabetta Chicca and Thorben Schoepe, both of the University of Groningen, to test their model of how insects navigate. The robot is placed in a corridor with random prints on the sides. (Image: Leoni von Ristok)
|
Brains on wheels
|
|
In search of the neural mechanism that drives insect behaviour, PhD student Thorben Schoepe developed a model of its neuronal activity and a small robot that uses this model to navigate. All this was done under Chicca’s supervision, and in close collaboration with neurobiologist Martin Egelhaaf of Bielefeld University, who helped to identify the insects’ computational principles.
|
|
Schoepe’s model is based on one main principle: always steer towards the area with the least apparent motion. He had his robot drive through a long ‘corridor'—consisting of two walls with a random print on it—and the robot centred in the middle of the corridor, as insects tend to do.
|
|
In other (virtual) environments, such as a space with obstacles or small openings, Schoepe’s model also showed similar behaviour to insects. ‘The model is so good’, Chicca concludes, ‘that once you set it up, it will perform in all kinds of environments. That’s the beauty of this result.’
|
Hardwired instead of learned
|
|
The fact that a robot can navigate in a realistic environment is not new. Rather, the model gives insight into how insects do the job, and how they manage to do things so efficiently. Chicca explains: ‘Much of Robotics is not concerned with efficiency. We humans tend to learn new tasks as we grow up and within Robotics, this is reflected in the current trend of machine learning. But insects are able to fly immediately from birth. An efficient way of doing that is hardwired in their brains.’
|
|
In a similar way, you could make computers more efficient. Chicca shows a chip that her research group has previously developed: a strip with a surface area that is smaller than a key on your keyboard. In the future, she hopes to incorporate this specific insect behaviour in a chip as well. She comments: ‘Instead of using a general-purpose computer with all its possibilities, you can build specific hardware; a tiny chip that does the job, keeping things much smaller and energy-efficient.’
|

