| Apr 30, 2014 |
Snake-like robot advances automated assembly of aircraft wings
|
|
(Nanowerk News) The volume of air traffic has soared in the past few decades, and aircraft manufacturer Airbus expects to see this figure triple by 2030. On a single day, more than 1,300 take-offs and landings are handled by the flight tower at Frankfurt’s international airport. This represents no less than 155,000 passengers who pass through this airport each day. To provide sufficient planes to cover this need for air transportation capacity, aircraft manufacturers will have to modernize their production processes.
|
|
Until now, aircraft assembly has involved a high proportion of manual processes, which limits production output. These processes must be automated to increase the rate of production. In certain cases this can be achieved easily, but wing assembly remains a major challenge. Why is this so? The main reason lies in the complicated internal structure of the wings, which consist of a series of hollow chambers. The only access to this space is through narrow hatches with a length of 45 centimeters and a width of 25 centimeters; this makes it extremely difficult for assembly workers to climb through these openings in order to fit the bolts that hold the parts together and seal the joints. This drilling and sealing operation has to be repeated around 3,000 times for each wingbox. This is time-consuming work that demands intensive physical effort that quickly leads to fatigue, not to mention the health risks resulting from the volatile organic compounds released by the sealing materials.
|
|
Slim, multi-jointed robot system for use in narrow spaces
|
|
Conventional industrial robots are too inflexible to pass through narrow openings. Their rigid arms are not capable of reaching the outermost regions of a workspace that extends up to five meters in length. What is needed is a slim robot with articulated arms. Researchers at the Fraunhofer Institute for Machine Tools and Forming Technology IWU in Chemnitz are currently working on an automation solution based on articulated robot arms.
|
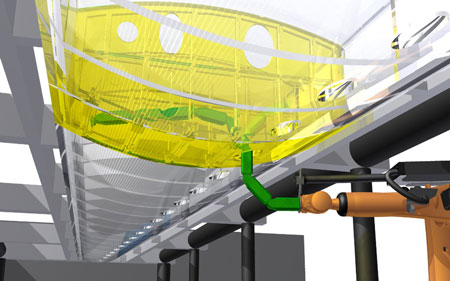 |
| The robot winds its way through the narrow openings inside the airfoil like a snake. Its articulated joints are so flexible that they can reach the furthermost regions of the workspace. (Image: Fraunhofer IWU)
|
|
“The robot is equipped with articulated arms consisting of eight series-connected elements which allow them to be rotated or inclined within a very narrow radius in order to reach the furthest extremities of the wingbox cavities. That’s why we often refer to the system as a snake robot,” says IWU project manager Marco Breitfeld.
|
|
The tool is attached to the first in the series of eight limbs, or can be replaced by an inspection camera if required. In total, the robot arm measures 2.5 meters in length and is capable of supporting tools weighing up to 15 kilograms in addition to its own weight.
|
|
The kinematics used to drive the robot are based on a sophisticated mechanism including an innovative gear system for which a patent application has been filed. Conventional motors are not an option for the individual sections of the robot arm, due to their compact design. Breitfeld’s team has therefore integrated a very small motor in each of the eight sections of the robot arm, which together are capable of generating a very high torque of up to 500 Newton-meters. Used in conjunction with a cord-and-spindle drive system, each section of the robot arm can be moved independently and turned through an angle of up to 90 degrees.
|
|
“The drive concept allows this solution to be used in any situation requiring the application of high forces and torque within a limited space,” Breitfeld says. “There is a need for compact automation solutions of this type in aircraft manufacturing, automobile construction, and power plant design.”
|
|
The next stage in the project involves installing the 60-kilogram robot on a mobile platform or rails, allowing it to travel along the length of the wingbox and penetrate each chamber. The mobile robot platform developed by the Fraunhofer Institute for Factory Operation and Automation IFF as part of the EU-funded VALERI project would be a suitable option. At present, the IWU researchers are testing the mechanical design and control functions. A demonstration model of the robot will be presented at the Automatica trade show in Munich from June 3 to 6 (in Halle B4, Booth 228). A full version of the system equipped with an eight-part articulated robotic arm is to be created by the end of 2014.
|

