| Jun 29, 2015 |
Materials modelled after plants may help robots to move more naturally
|
|
(Nanowerk News) Engineers developing moveable robot components may soon take advantage of a trick plants use. Researchers at the Max Planck Institute of Colloids and Interfaces in Potsdam and Harvard University in Cambridge (USA) have devised porous materials that could serve as actuators, or motors. The dynamic mechanism of the material resembles that of some plant tissues. When pressure is increased in the pores of the polymer, the structure swells and expands in a preferred direction. In this way, the researchers mimic the mechanism by which some non-vital parts of plants perform movements, e.g. the seed capsules of ice plants.
|
|
The researchers used theoretical modelling to analyse how the expansion behaviour of the materials depends on its structure and tested the results with advanced 3D printing technology.
|
|
The new findings ("The Geometric Design and Fabrication of Actuating Cellular Structures") could serve as a basis for designing moveable components with especially natural mobile properties, for example for applications in robots.
|
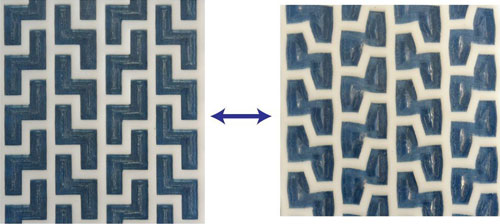 |
| The actuator developed by the Max Planck researchers has a honeycombed cellular structure. The walls of the cells are made of a non-swellable polymer; a swellable polymer fills the interior of the chambers. If the pressure inside the cells increases, for example, because the swellable polymer absorbs liquids, the structure expands in one direction. (© Advanced Materials Interfaces/ MPI of Colloids and Interfaces)
|
|
If you enjoy walking in the woods, you may well be familiar with the phenomenon. In the rain, conifer cones lying on the ground remain closed. By contrast, when it’s dry, they open. In this way conifers prevent their seeds from absorbing moisture and becoming too heavy to be spread by the wind. The ice plant does just the opposite: it releases its seeds in humid weather when the conditions are perfect for germination. A sophisticated covering layer on the seed capsules ensures that the capsules remain closed in dry weather and open in wet weather.
|
|
In both examples, moisture causes plant cells to change shape dramatically. After absorbing water, they – and the tissue they comprise – expand in such a way that entire plant parts move in a defined pattern. In the case of conifer cones, moisture causes the scales to close, whereas in the case of the ice plant, moisture induces the seed capsules to open.
|
|
A prime mover based solely on physical mechanisms
|
|
Researchers are particularly excited because these movements are not driven by energy from metabolic processes but solely by physical mechanisms. From a biological point of view, there’s no other way to achieve this. After all, the material – for example that of a fallen pinecone – is already dead.
|
|
Researchers at the Max Planck Institute of Colloids and Interfaces in Potsdam have now investigated in detail how the material properties, geometry and arrangement of the cells affect macroscopic movements. To this end, they developed a computer simulation as well as tissue-like materials from a porous polymer in which the pores roughly model the cells in the biological material.
|
|
What they found is fascinating. The nature of the expansion is determined not only by the shape of the cells. Another key factor is how the cells are arranged with respect to each other. In one case the scientists tested three different honeycomb structures made up of the same basic cell. They constructed an eight-sided shape – a sort of rectangle whose two halves are juxtaposed to form a steplike structure. The researchers postulated that the additional angles formed on two sides of the cell would act as hinges, allowing the cell to change shape better. An earlier study had shown that as the cell expands, an angle in the cell wall changes more easily than the cell wall itself, as the latter would require significantly more energy.
|
|
When the air or fluid pressure inside the cells was increased, two of the three honeycomb structures moved preferentially in one direction but formed different new cell geometries in the process. In the third arrangement, the structure expanded diagonally, resulting in a shearing effect on the cell network. In all three arrangements, the initial rise in pressure immediately led to marked expansion. However, further increases in pressure had diminishing effects on the material’s expansion.
|
|
A flexible lever for moving components in a desired direction
|
|
“We can precisely control the nature of macroscopic expansion by means of the shape and arrangement of the cells,” says John Dunlop, who heads the Biomimetic Actuation and Tissue Growth Group in the Biomaterials Department of the Max Planck Institute in Potsdam, made a significant contribution to the recent work. “We now have a very flexible lever which we can use, for example, to shape and move components in a highly defined and characteristic manner.”
|
|
The work is still in the basic-research phase. However, in the long term the scientists envision applications in robotics, for example. Instead of the very angular and rigid movement patterns associated with motors, sequences of movements might be conceivable that are much softer, nuanced and more natural, Dunlop says. Moveable parts of such robots, the actuators, might consist of a porous polymer with precisely defined pore properties. “The actual motion could then be controlled by compressed air or an expandable fluid in the pores,” Dunlop explains. Such constructions may even be more robust and less susceptible to faults than electronically controlled robots. However, all this must await practical tests in the robotics industry.
|
|
The researchers were also delighted that the theoretical predictions from the computer simulation almost perfectly matched the results of their tests on synthesized porous polymer materials. Only the amount of expansion was somewhat less in the experiment than in the virtual simulation. “This means that we’re able to design such materials on the computer and then test their behaviour experimentally,” says Dunlop.
|
|
Synthetic polymer honeycomb structures from a 3D printer
|
|
The composition of the cell walls plays a key role in the expansion process in the relevant cells of pinecones and the seed capsules of ice plants. They consist chiefly of lignin, which does not swell, and cellulose, which readily does so. The researchers simulated this structure for their practical experiments by bonding two different swellable polymer layers together. Scientists at Harvard University in Cambridge, USA, manufactured the material with the help of a multimaterial 3D printer. To induce swelling, the Potsdam researchers used a solvent.
|
|
The scientists envisage using porous polymer materials whose pores are filled with a hygroscopic fluid, for example a superabsorbing hydrogel, in future practical applications.
|
|
It remains to be seen how the movement of such cell structures can be reliably translated into a practical actuator. But perhaps here too the researchers can learn a lesson from pinecones and ice-plant seed capsules. They are, after all, masters in the mechanics of opening – and closing again – at the right time.
|

