| Dec 03, 2023 |
Soft robotic arm mimics octopus' agility with stretchable electronics
|
|
(Nanowerk News) Roboticists have long aspired to match the dexterity and adaptability of animals with engineered creations. Soft-bodied creatures like octopuses can smoothly interact with uncertain environments thanks to sensitive skin and muscles. Now researchers from Beihang University, Tsinghua University, and the National University of Singapore have developed a soft robot that combines stretchable electronics with bioinspired motion. Their creation marks progress toward nimble robots that can perceive and manipulate the world around them.
|
|
Animals excel at operating in messy settings rife with unknowns. Consider how an octopus catches prey. It unfurls an arm toward its target using a characteristic “bend propagation” motion directed from the base to the tip. Once suckers at the end establish preliminary grip, a neural network in the arm skin halts the whip-like motion and triggers grasping. Finally, the octopus withdraws the arm to ferry food to its mouth. This sequence illustrates how even with limited inputs, animals integrate touch sensation across flexible limbs to accomplish tasks.
|
|
Unfortunately, most robots lack the softness, sensations, and adaptability of natural creatures. Traditional industrial automatons have rigid links rather than supple limbs. And without skin, they remain oblivious to much of their surroundings. These hard-bodied machines work well in controlled environments like factories but falter when venturing into the tumult of the real world.
|
|
Recently soft robotics has emerged as an alternative paradigm to overcome the constraints of conventional rigidity. Soft robots crafted from elastic polymers or textiles can bend, twist, and deform. This compliance aids operation in cramped, chaotic spaces and enables safer human-robot interaction. However, most existing devices still lack critical perception and intelligence.
|
|
Truly effective soft robots require sensory skin, processors, and controls distributed across their morphing contours. Such integration necessitates stretchable rather than brittle electronics that can withstand repeated mechanical strains. Over the past decade materials scientists have made progress printing conductive circuitry with liquid metals and other techniques. Yet applying stretchable electronics to responsive soft robots has remained an open grand challenge.
|
|
Now researchers from China and Singapore report in Science Robotics ("Octopus-inspired sensorized soft arm for environmental interaction") on their bioinspired soft robot that points to one solution. Dubbed the electronics-integrated soft octopus arm mimic (E-SOAM), their creation advances soft robotics on multiple fronts. It combines innovation in materials and design to replicate octopus functionality using liquid metal electronics. The results showcase dexterous performance previously difficult to achieve without rigid components.
|
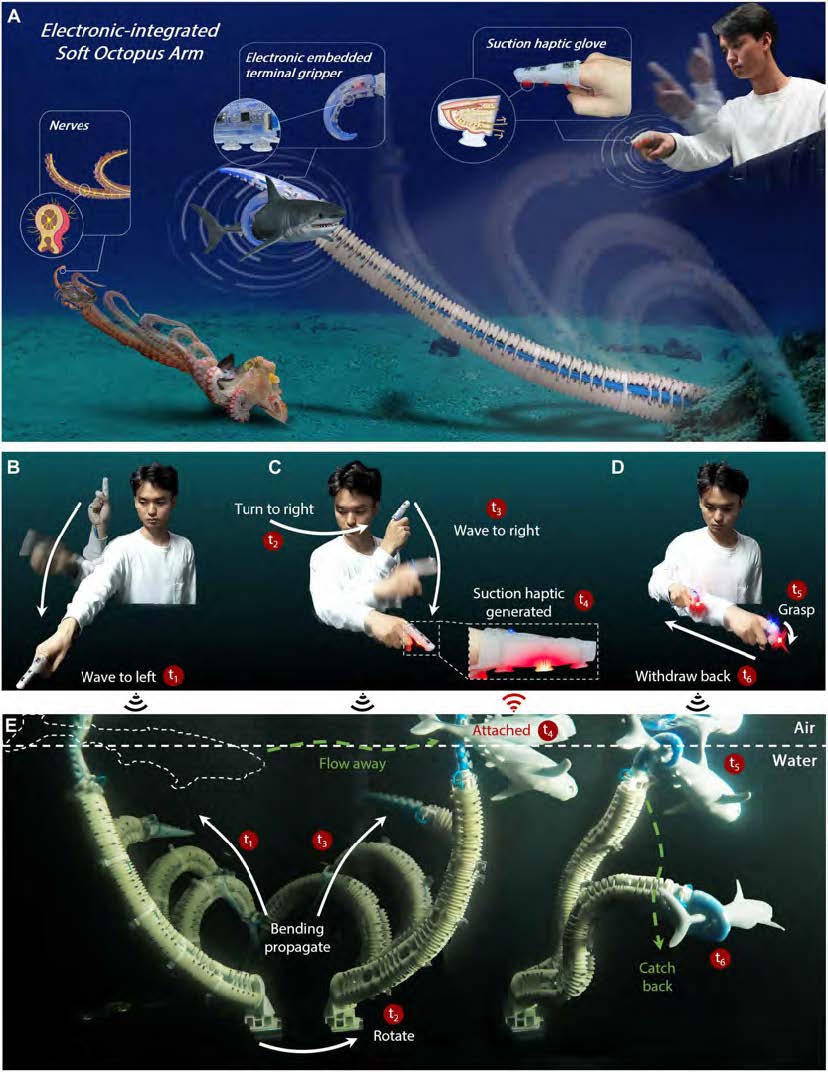 |
| E-SOAM for human interactive manipulation in complex environment. (A) A depiction of the E-SOAM’s manipulation profile and design. The image shows an octopus performing its classical bending propagation. The arm and sucker nerves play an important role when the octopus captures prey. The E-SOAM robot displays a version of bend propagation to grasp a target. Liquid metal embedded in the terminal gripper mimics the octopus nerves and sensing ability. A human using a liquid metal–based soft wearable finger glove with bidirectional feedback loop. The haptic device generates haptic stimuli based on E-SOAM’s suction sensation and sends them to a human user, who can in turn use this input to adjust their control of the E-SOAM. (B to E) Out-of-plane, human-operated E-SOAM sweeping and grasping underwater. (B) When the human operator thrusts a finger leftward, E-SOAM bend propagates to the left (E, t1), and the floating toy shark “swims” away and escapes. (C) When the operator turns their elbow rightward and thrusts a finger down, E-SOAM rotates out of its original plane to the right (t2). The operator then moves the finger to control the robot’s bending (t3), and suction haptic is generated on the human finger when suckers attach to the object on the surface of the water (t4). (D) After the object is stably grasped (t5), it is pulled back into the water (t6).
|
|
Conceptually the E-SOAM seeks to implement a “touch-perceive-execute” strategy like octopuses. It has a slender five-segment arm with a soft gripper at the tip housing printed liquid metal sensors and circuits. Truly groundbreaking, this stretchable network can measure bending, temperature, and suction under strains over 700% and still transmit signals wirelessly.
|
|
Integrating the electronics with soft artificial suckers and arm segments took insight and perseverance. The team had to carefully map the predicted strains during motion and locate the circuits accordingly. Brittle links between rigid integrated circuit chips and the surrounding rubbery matrix caused early difficulties. However, numerical optimization and a liquid metal printing technique gradually overcame connection challenges without sacrificing sensing capabilities.
|
|
Once assembled, the E-SOAM’s embedded electronics allow its soft gripper to reconstruct arm curvature from the output of strain gauges along its length. This proprioception helps the robot perceive its own shape during dramatic deformation. Further inspiration from octopuses came in the form of a simple yet efficient bend propagation strategy the researchers derived to control the E-SOAM’s movement toward targets.
|
|
Besides reflexively shaping itself the E-SOAM can also sense contact. Conductive liquid metal lines in the undersides of its suckers change resistance when pushed against surfaces. This information triggers grasping reflexes much like suckers signaling octopus arms to curl further. Each sucker contains an independent sensing circuit, conferring detailed touch perception.
|
|
As a culmination the team tested their soft robot’s reaching, grasping and object manipulation competency. With vision systems or human guidance directing its motion, the E-SOAM could traverse confined spaces, differentiate temperature gradients, and use coordinated bend propagation to retrieve items with its gripper. Haptic feedback from artificial skin to a wearable glove even allowed a blindfolded operator to remotely control these functions. Such nuanced bidirectional interaction between a human and soft robot in uncertain settings represents a feat.
|
|
This research provides a template for integrating stretchable electronics into deformable robots to approach the performance of organisms. There remains ample room for improvement, however. Currently only the gripper contains the special sensors and processors; expanding the sensing regions across more of the arm could enhance utility further. And the technology still falls short of matching an octopus’ full behavioral range. Nevertheless, the gains over conventional rigid robots are manifest.
|
|
Looking ahead there are many potential applications for responsive machines that can delicately interact with people and unpredictable environments. Examples span search and rescue, industrial inspection, surgery, rehabilitation and assistive devices, wearables, and more. As the components continue advancing in durability and sophistication, soft robots integrating distributed stretchable electronics could profoundly impact society much like past waves of automation. Yet this time bringing enhanced adaptability and cooperation closer to the animal kingdom’s graceful expertise.
|

