| Jan 31, 2024 |
Shape-shifting robot shifts between driving and flying in an instant
|
|
(Nanowerk News) Biologically inspired robotics aims to replicate the extraordinary versatility found in nature. Chameleons alter skin pigmentation to camouflage against predators. Birds morph wings for both aerial agility and diving to depths. The key to survival across species lies in adapting form and function to fluidly meet environmental demands. Engineers endeavor to instill similar shape-shifting talents in robots to enhance real-world utility. Multifunctional droids that walk, swim or fly by physically transforming hold promise for search and rescue, exploration and navigation across uneven terrain.
|
|
Yet existing designs fall short of biology’s combination of efficiency, speed and versatility. Bulky mechanics, high power draw and slow transition times between locomotive states constrain effectiveness. Recent innovations begin overcoming these barriers through bio-inspired actuation architectures far faster, stronger and more nimble than conventional motors.
|
|
Researchers at Virginia Tech now have developed a robot that shifts between driving and flying configurations near-instantaneously while drawing minimal power. Controlled entirely wirelessly, this nimble machine navigates complex environments inaccessible via any singular form of mobility. The work provides a model for surgically integrating similarly bio-inspired parts to improve future robot functionality across configurations.
|
|
The rapid transformation leverages a “latch-mediated spring-actuated” (LaMSA) system inspired by biological mechanisms behind the trap-jaw ant’s lightning-fast mandible snap. Shape memory alloy (SMA) wire, which contracts when heated via electric current, actuates mechanical links connected to compression springs. As the SMA wires trigger motion, the springs simultaneously store energy. Surpassing the wires' force, this stored tension then releases suddenly like a catapult to rotate the robot’s wings through the remainder of the movement.
|
|
This architecture amplifies speed and power output to swiftly pivot the robot between shapes optimized for wheeled ground transport or flight while expending minimal energy. The approach provides a model for surgically integrating similarly bio-inspired parts to improve future robot functionality across configurations.
|
|
As detailed in a paper published in Advanced Intelligent Systems ("Rapid and Reversible Morphing to Enable Multifunctionality in Robots"), the team’s creation essentially shape-shifts between wheeled ground transport and aerial flight modes in the blink of an eye while drawing very little power. Controlled entirely wirelessly, the untethered robot can traverse extremely uneven terrain and obstructed passages impassable via any single form of locomotion.
|
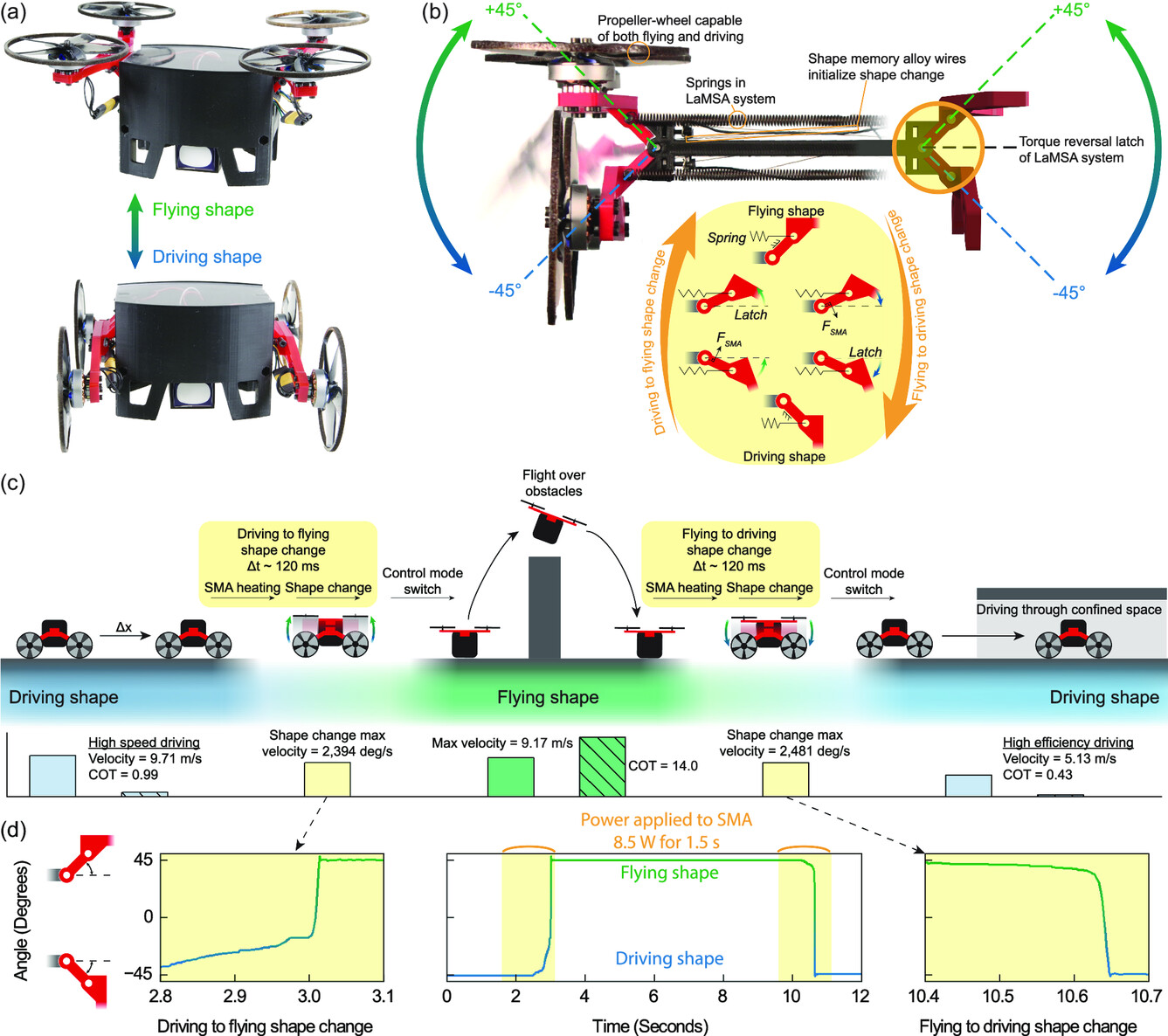 |
| Overview of the LaMSA-driven, multifunctional morphing robot. a) Multifunctional robot in both flying and driving shapes. b) Overlaid images showing the motion of the wing in the flying-to-driving shape change, along with an inset showing the motion and driving forces of the LaMSA shape change. c) Example sequence of operations for the shape-changing robot, showing driving, flying, and multiple shape changes. Through these, relevant metrics are plotted on axes below the schematic. d) Angle of the morphing system over time for a switch from driving to flying mode, then a return to driving mode. The central plot shows the entire duration, while the left and right show just the driving-to-flying and flying-to-driving shape changes, respectively. The highlighted yellow regions represent moments during which electric power is applied. (Image: Reprinted with permission by Wiley-VCH Verlag)
|
|
The researchers explain that LaMSA systems powering ultrafast motions in organisms like trap-jaw ants and Venus flytraps can likewise amplify speed and efficiency in engineered systems. The team thus implemented LaMSA architecture in their robot, using power stored in springs and released by latch mechanisms rather than conventional motors to rapidly reconfigure between shapes better suited for driving or flying at a given moment.
|
|
Morphing from driving to flying mode or vice versa takes just 50 milliseconds, with the robot’s wings pivoting at up to 2300 degrees per second. This allows on-demand transformation that permits navigating the most suitable form through complex environments. For example, the robot can drive through narrow tunnels inaccessible from the air before sprouting wings to fly over debris piles blocking the way forward on land.
|
|
Remarkably, shape changes draw only 1.5 seconds of power input totaling 8.5 watts. The robot requires no energy expenditure to then maintain either wheels or wings positioned for driving or flying post-transformation. Repeated morphing does not degrade performance over many cycles. The researchers 3D printed the LaMSA components to create an ultra lightweight and durable latching structure at the robot’s core.
|
|
This bistable and efficient LaMSA architecture addresses common actuation challenges related to space, scaling, speed and energy use that have thus far constrained multifunctional robot versatility. By proving viability in a small prototype, the work opens the door to integrating similarly compact LaMSA parts into robots of all sizes to enhance utility.
|
|
The robot further simplifies its dual transport modes by using the same motor system to power both flying and driving. The researchers innovatively combined a commercial drone propeller with an attached wheel rim that contacts the ground when rotated for locomotion in driving mode. When shifted into flight stance, the full propeller blades generate lift for aerial mobility using the same motors.
|
|
This elegantly unified propulsion system avoids the complexity, redundancy and efficiency losses associated with integrating wholly separate flying and driving mechanical components. Data confirms propulsion performance on par with commercial drones during flight and excellent speed and energy efficiency while driving.
|
|
For example, the robot achieved peak driving speeds of 9.7 meters per second while drawing minimal power for an extremely low cost of transport, surpassing metrics from specialized singular-mode robots. The morphing robot can likewise fly at speeds over 9 meters per second. It can thus traverse long distances driving while retaining battery power for flight using its optimal modality for different segments of irregular terrain.
|
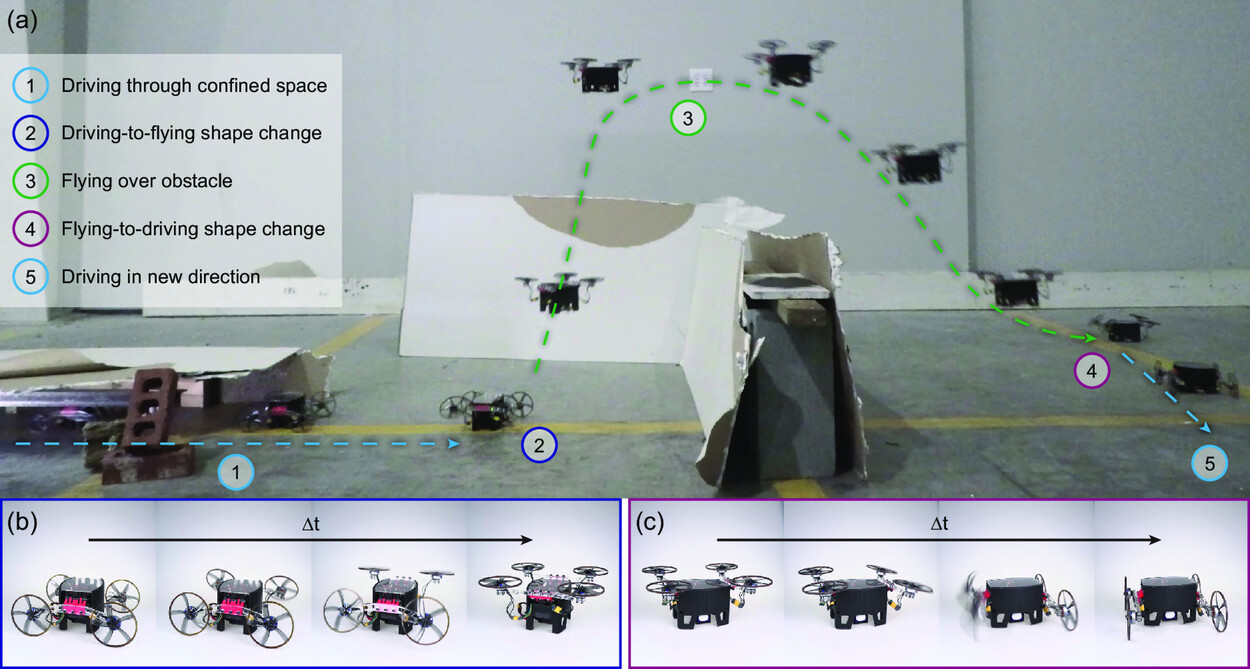 |
| Demonstration of the multifunctional robot. a) Navigation of a simulated destroyed building environment, showing driving through a confined space, flying over an obstacle, and both shape changes. b) Image sequence of a driving-to-flying shape change. c) Image sequence of a flying-to-driving shape change. (Image: Reprinted with permission by Wiley-VCH Verlag)
|
|
The researchers culminated testing by demonstrating the robot’s abilities across a simulated disaster site obstacle course. The robot autonomously navigated a passageway too narrow for flying before employing its rapid shape change to sprout wings and take to the air upon reaching an impassible wall, before finally morphing back to wheeled form to exit the course. Control was entirely wireless throughout the demonstration as power and functionality were completely embedded.
|
|
In nature, the researchers note organisms traverse widely varying environments by optimizing form and function for each condition. This new robot likewise leverages efficient, ultrafast shape change capabilities to better adapt on the fly across complex settings.
|
|
Its responsive unveiling of wings or wheels as ideal transport modalities for assorted obstacles offers a template for future incarnations to move with unprecedented versatility through real-world spaces. The efficiency and seamless wireless operation likewise expands potential range while ensuring no human risks direct exposure in hazardous sites.
|
|
The rapid LaMSA actuation system provides a model for integrating bio-inspired architectures as modular components enabling new functionalities in robots of all classifications and scales moving forward. Rather than wholly redesigning systems around high-power impulsive mechanisms only viable for tiny constructs, this work proves the value of deploying such parts surgically to improve utility.
|

