| Aug 21, 2025 |
Plant inspired robotic gripper combines sensitivity with strength
A new robotic gripper inspired by seed pods can switch between gentle and powerful grips, holding objects without continuous energy and boosting robot adaptability.
|
|
(Nanowerk News) Robotic grippers are becoming more nimble, thanks to a design inspired by nature. A research team from Dalian University of Technology in China has developed a bio-inspired bistable robotic gripper that can hold objects without consuming energy, while also switching between delicate and powerful grasping modes.
|
|
Their work was published in the journal Research ("Instant Energy Barrier Modulation in Bistable Robotic Grippers for Compliant Triggering and Powerful Grasping").
|
|
Grasping is a fundamental skill in biology, from human hands to plant seed pods. For decades, engineers have tried to replicate this ability in machines. Most robotic grippers use soft materials such as silicone or origami-like structures, but they are slow to respond and require constant energy to maintain a grip.
|
|
Bistable structures—mechanisms with two stable states, open and closed—solve part of the problem. Once they snap into place, they stay put without using energy. But traditional bistable grippers have a fixed energy barrier, meaning the force required to trigger their movement cannot be adjusted. This rigidity limits their use in complex, real-world environments.
|
|
The new gripper overcomes that barrier. Inspired by the seed pods of the Impatiens plant, which hold tightly until maturity and then explode with the slightest touch, the researchers built a system that can tune its energy threshold. Dr. Peng, a co-author of the study, explains: “Seed pods maintain a high energy barrier while growing to avoid premature release. At maturity, that barrier drops dramatically, making them highly sensitive—even a raindrop can trigger seed dispersal. Our gripper uses a similar principle for energy-efficient and responsive manipulation.”
|
|
The device uses an elastic beam clamped at both ends and connected to rotating shafts controlled by a motor. Initially flat, the beam is bent into a bistable structure when the motor turns. In this state, the gripper can operate with a low energy barrier, snapping shut with a triggering force of just 0.66 newtons. To strengthen the grip, the motor can further bend the beam, raising the energy barrier so the closed gripper can withstand forces up to 12.08 newtons without releasing. This tunability allows the same gripper to handle fragile objects delicately or hold firmly under stress.
|
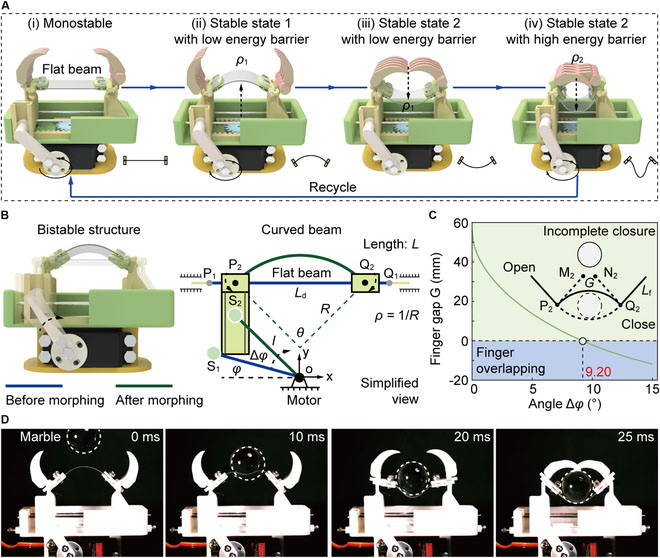 |
| The proposed bistable gripper can maintain its grasp even without continuous energy input, while also being able to modulate its activation force, representing a new paradigm in robotic gripper design. (Image: Science and Technology Review Publishing House) (click on image to enlarge)
|
|
The team demonstrated its real-world potential by attaching the gripper to an unmanned aerial vehicle (UAV). The drone was able to perch on tree branches like a bird, staying locked in place even in strong winds without draining its battery. When needed, the gripper could be released remotely via Bluetooth. Beyond perching, the technology could allow UAVs to anchor on surfaces, deploy sensors, or interact with the environment with minimal energy use.
|
|
“With its rapid response, adjustable forces, and efficient design, this gripper paves the way for more adaptable and capable robots,” said Dr. Wu, another author of the study. “It could significantly expand how robotic systems interact with the world.”
|


