| Posted: Mar 06, 2012 |
Robotic Venus flytrap aids artificial muscle research |
| (Nanowerk Spotlight) The Venus flytrap (Dionaea muscipula) is a carnivorous plant that catches and digests little insects. Its trapping mechanism consists of a series of tiny hairs at the crease where the plant's two leaves join. When a fly or spider walk across these hairs, touching two or more of them in succession, the two leaves will close quickly enough – within hundreds of milliseconds – to prevent its escape. Now, researchers have used it as inspiration for a new biomimetic robot made with artificial muscles. |
 |
| Dionaea muscipula |
| Mohsen Shahinpoor, Richard C. Hill Professor & Chairman, Mechanical Engineering Department at the University of Maine, has created a robotic replica of the carnivorous Venus flytrap with nanosensors and a thin, pliable metal composite material that he invented as part of his ongoing artificial muscle research. The device offers promise in the development of electrically stimulated artificial muscle that could be implanted in people to help overcome muscular disease or paralysis. |
| Reporting his work in a recent issue of Bioinspiration & Biomimetics ("Biomimetic robotic Venus flytrap (Dionaea muscipula Ellis) made with ionic polymer metal composites"; free access article), Shahinpoor describes a novel design of the flytrap by means of ionic polymeric metal composite (IPMC) artificial muscles as distributed nanosensors and nanoactuators. |
| In 2000, Shahinpoor and his collaborators presented the first phenomenological modeling of sensing and actuation in IPMCs based on linear irreversible thermodynamics and equilibrium of forces and fluxes (see paper in Europhysics Letters: "Mechanoelectric effects in ionic gels"). |
| Shahinpoor explains that the basic mechanisms of sensing and actuation in IPMCs are based on ionic rearrangements due to an imposed electric field across the muscles strip or due to mechanically bending and deforming the IPMC strip. This forces the internal cations to rearrange themselves and thus create an electric potential due to Poisson's phenomenon. |
| He points out that the rapid leaf closing response of a Venus flytrap is similar to the response of an engineered actuator system. If it was possible to employ IPMCs as biomimetic sensors and actuators then one could fabricate a system with built-in sensors and actuators – i.e. a robotic Venus flytrap system can be designed using IPMCs. |
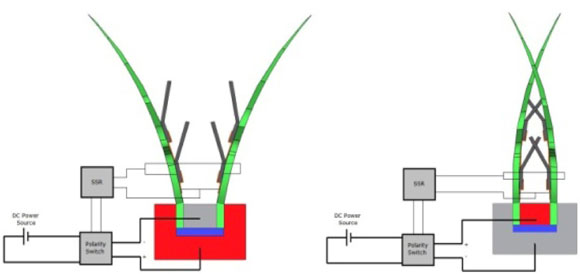 |
| Side view design of the robotic Venus flytrap in open (a) and closed (b) configurations. Note the IPMC trigger hairs mounted in the middle of the lobes to act as sensors to create a signal. Note the electronic circuitry connecting the IPMC trigger hairs to a solid-state relay system that would in turn activate the actuation voltage to close the lobes or traps. (Reprinted with permission from IOP) |
| To design the robotic Venus flytrap, Shahinpoor attached trigger hair-like IPMCs onto larger leaves of IPMC material. Two leaves, which form the trap, are then attached to a central spine (a conductive copper role serving as common electrode). The set-up allows the trigger hair sensing signals to activate a solid-state relay to in turn activate a small dynamic voltage generator to actuate the lobes or close the traps. |
| Shahinpoor tested the fabricated robotic flytrap experimentally and he says it was quite successful in mimicking the Venus flytrap in a biomimetic manner in capturing a prey. |
| The development of artificial muscles is one of the key areas for bionic enhancements or replacements. Artificial muscles like these could find applications in the medical field or for engineering applications. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
