| Posted: Jun 24, 2014 |
Embedded 3D printing for soft robotics fabrication |
| (Nanowerk Spotlight) The field of robotics has come a long way from its early days of bulky mechanical machines used on industrial assembly lines. As robots penetrate the physical world more and more, engineers have looked for ways to make soft robotic systems safer for human interaction. Without bulky, breakable hardware, soft robots also might be able to explore hard-to-reach spaces and traverse bumpy terrain. |
| Watch this video of an autonomous robot – made almost entirely of soft materials – that moves via peristalsis, crawling across surfaces by contracting segments of its body, much like an earthworm: |
| Read more about 'meshworm' |
| A significant challenge in soft robotics involves fabricating soft sensors and actuators which, so far, have been very tedious to produce. Building soft sensors used by roboticists usually requires a multi-step, manual molding-lamination-sealing-infilling process. |
| As a result, the design and fabrication process is cumbersome; the sensor form factors are unnecessarily limited; and there are issues with mechanical robustness. |
| Now, though, a research team led by professors Jennifer A. Lewis and Robert Wood from the School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering at Harvard University, have demonstrated a new method for creating highly stretchable sensors based on embedded 3D printing of a carbon-based resistive ink within an elastomeric matrix (for which they coined the term 'e-3DP'). |
| The team reported their findings in the June 16, 2014 online edition of Advanced Materials ("Embedded 3D Printing of Strain Sensors within Highly Stretchable Elastomers"). |
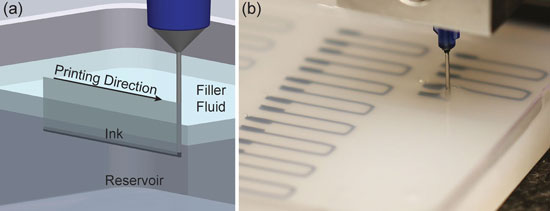 |
| (a) Schematic illustration of the embedded 3D printing (e-3DP) process. A conductive ink is printed into an uncured elastomeric reservoir, which is capped by filler fluid. (b) Photo graph of e-3DP for a planar array of soft strain sensors. (Reprinted by permission of Wiley-VCH Verlag) |
| "By implementing e-3DP, we can vastly accelerate the design and implementation of soft sensors," Lewis tells Nanowerk. "We believe that this manufacturing technique has potential application in many fields. Ideally, with appropriate material development, e-3DP could be implemented to created embedded electronic devices that are currently made via layer-by-layer processing and where material interfaces limit their performance. Specifically, soft robots, wearable electronics, and soft actuators are the most immediate applications. In the future, we plan to extend e-3DP to create novel 3D microfluidic devices and well beyond." |
| To enable e-3DP, the team developed a multicomponent materials system composed of an ink, reservoir, and filler fluid. These constituents are tailored to exhibit the desired rheological properties required to maintain high-fidelity geometries throughout the embedded printing and curing process. |
| To pattern the sensing elements of the printed 3D devices, the researchers used carbon conductive grease, an off-the-shelf, inexpensive, environmentally benign suspension of carbon black particles in silicone oil as the functional ink. |
| "Several criteria must be fulfilled when designing an appropriate supporting reservoir and filler fluid for e-3DP," explains Lewis. "First, the reservoir must facilitate patterning the desired ink filaments without breakup. Second, any defects that arise during printing as the nozzle translates within the reservoir must be rapidly healed by incorporation of the filler fluid. Finally, after printing the embedded sensing elements, the infilled reservoir must be transformed by curing into a monolithic, highly extensible, conformal elastomer matrix." |
| To meet these requirements, the team modified a commercially available silicone elastomer to create both the reservoir and filler fluid. |
 |
| Photograph of a three-layer strain and pressure sensor in a stretched state. (Reprinted by permission of Wiley-VCH Verlag) |
| One of the key results of this work is the demonstrated ability to pattern chemically dissimilar materials within each other. Specifically, the deposition of a conductive ink into an elastomeric reservoir that serves as the sensing element and matrix, respectively, for the printed soft sensors. |
| While attention has focused on 3D printing of rigid materials such as plastics and metals, this work demonstrates the printing of soft materials, which opens up myriad applications – including soft robots, actuators, and wearable sensors. |
| The researchers note that their e-3DP method significantly simplifies the fabrication of soft sensors. Soft sensors have been the subject of much research for their potential to interface with the human body. However, problems such as limited extensibility, high cost, poor durability, or lack of manufacturing scalability have prevented their widespread adoption. |
 |
| Photograph of a glove with embedded strain sensors produced by e-3DP. (Reprinted by permission of Wiley-VCH Verlag) |
| "e-3DP allows sensors to be created in a highly programmable and seamless manner," Lewis points out. "Print path control coupled with the supporting reservoir enables arbitrary geometries in planar and 3D motifs to be created, while interfaces between layers are eliminated – significantly improving device reliability." |
| Going forward, the team will address two of the currently most pressing challenges of the e-3DP process: further improving the conductive ink performance and improving interconnects to rigid components. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
