| Posted: Jan 17, 2018 |
Manipulating colloids with mobile nanotweezers |
| (Nanowerk Spotlight) Plasmonic 'nanotweezers' are structures made of noble metals that concentrate and absorb light, resulting in 'plasmonic hotspots' that make it possible to manipulate nanoscale objects suspended in a fluid. The capability to position tiny objects quickly and accurately and trapping them in a specific place enables improved nanoscale sensing methods and aids research in biophysics and nanofabrication. |
| Conventional plasmonic tweezers are fixed in space where trapping occurs at predefined spots on the surface of a nanopatterned substrate, which is a clear drawback in terms of transport. |
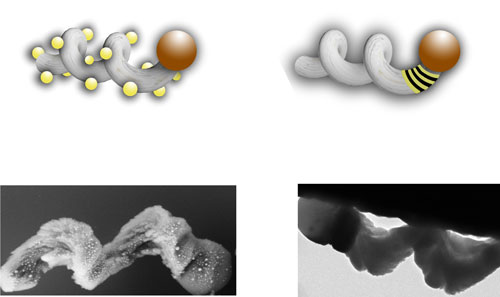 |
| Schematics of mobile nanotweezers D1 (MNT-D1) and MNT-D2. Both designs contained iron as the magnetic element integrated with the helical structure. Whereas D1 contained small plasmonic (silver) nanoparticles distributed across its surface, alternating layers of silver (plasmonic) and iron (magnetic) were incorporated within the structure of D2. (Image: Ghosh and Ghosh, Sci. Robot. 3, eaaq0076 (2018)) |
| Reporting their work in Science Robotics ("Mobile nanotweezers for active colloidal manipulation"), PhD student Souvik Ghosh and Prof. Ambarish Ghosh from the Centre for Nano Science and Engineering, Indian Institute of Science in Bangalore, demonstrate that it is possible to overcome such drawbacks by integrating plasmonic tweezers with microrobots, resulting in mobile nanotweezers whose performance combines the best of both worlds: capturing, maneuvering, and positioning sub micrometer objects of various materials at low illumination intensities, high speeds, and with great control. |
| This technique is applicable to different types of particles in various fluids. |
| Capture and release of different-sized silica beads by a mobile nanotweezer nanorobot. (Video: Ghosh and Ghosh, Sci. Robot. 3, eaaq0076 (2018)) |
| "Traditional plasmonic tweezers are good at trapping small objects, but work very slowly due to their static nature," Souvik Ghosh explains to Nanowerk. "Microbots can carry/push objects very quickly, but do not work well for sub-micron objects. By combining the functions of these two technologies, we can trap very small objects very quickly." |
| "Apart from carrying small objects to various spots of a microfluidic device, we can also localize them with high spatial resolution and then take them away if necessary. This should open up new avenues in nanoscale assembly that did not exist before, "adds Prof. Ambarish Ghosh |
| The team's chosen microrobots are based on ferromagnetic, helical nanostructures that can be driven by a rotating, homogeneous magnetic field close to the target colloids to subsequently trap and manoeuvre. Their motion resembles the way various microorganisms translate by rotating helical flagella and offers higher efficiency than maneuvering objects using magnetic field gradients. |
| Directed by a rotating magnetic field, the mobile nanotweezers spin through their environment and capture their targets without accidentally 'trapping' other particles. (Video: Ghosh and Ghosh, Sci. Robot. 3, eaaq0076 (2018)) |
| This work has implications for research in microfluidics and nanoscale assembly. In microfluidics, it enables positioning, sorting and transporting collection/single particles in a size range (as low as 100 nm) that was not possible before. Especially interesting is being able to carry live bacteria, since this technique uses very low light intensity to trap the bacteria without damaging them. |
| In nanoscale assembly, the ability to place very small objects such as nanodiamonds or quantum dots on specific positions on a device can be beneficial for next-generation quantum technologies, sensing devices, or nanolasers. |
| Going forward, the scientists will be working on making multiple nanotweezers operate in parallel. This will allow them to scale up their technology. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
