| Posted: Apr 03, 2018 |
Batch-assembly of reconfigurable, multimodal 3D electronics (w/video) |
| (Nanowerk Spotlight) Whiskers on animals allow them to build a rich understanding of their environment by feeling objects or even the flow of fluids. Many animals can also actively sweep, or 'whisk', their whiskers, enabling them to gather complex information about the architecture of their environment. |
| Researchers have replicated this whisking action by exploiting the shape memory effect of a polymer substrate, which can be dynamically repositioned by modulating the temperature and air flow across the electronic whiskers (e-whiskers). |
| "Using this process, we have demonstrated arrays of adaptive electronic whiskers that can sense a wide variety of stimuli using a single strain gauge, and which translate proximity, surface topology, friction, force, material stiffness, and temperature into precise electrical quantities," Jonathan Reeder, now a postdoctoral fellow in John Rogers' research group at Northwestern University, tells Nanowerk. |
| Reeder, first author of a paper on this research in Advanced Materials ("3D, Reconfigurable, Multimodal Electronic Whiskers via Directed Air Assembly"), performed this work while at Walter Voit's Advanced Polymer Research Lab at the University of Texas at Dallas. |
| "We can precisely measure the properties of surfaces by pressing or grazing electronic whiskers against objects, with the sensitivity to map the individual ridges of a fingerprint," comments Reeder. "With a response time less than 250 µs (1/4000th of a second), they respond to stimuli 10x faster than the mechanoreceptors in your fingertips." |
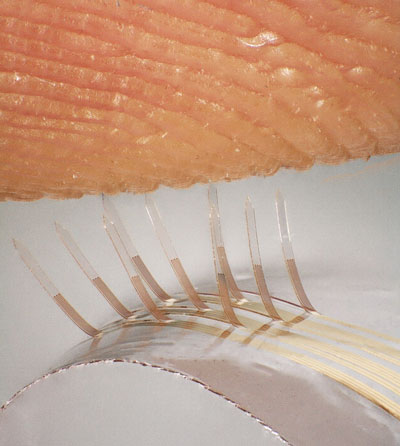 |
| Electronic whiskers touching the tip of a finger. (Image: Jonathan Reeder) |
| To fabricate their e-whiskers, the team created a new method of assembling electronics into 3D shapes, which exploits the shape-changing properties of a shape memory polymer substrate. |
| They are able to assemble arrays of 2D electronic precursors into upright positions by applying a flow of warm air to deform the e-whiskers, then a flow of cold air to lock them in place. Traditional electronic sensors are in planar, 2D formats, which limits the types of interactions they have with their environment. 3D e-whiskers, on the other hand, enable a variety of sensing modes not possible with 2D sensors. |
| "Directed air flow as a method of electronic assembly is interesting because it enables batch assembly of many sensors with a single step," explains Reeder. "The process is scalable to large arrays, so you could imagine arrays of thousands of these electronic whiskers being assembled in just a few seconds. We are exploring miniaturized air-handling systems for assembling and reconfiguring these sensors, as well as new sensing modalities which exploit the dynamics of these soft, cantilever structures." |
| The researchers used this process to create arrays of millimeter-scale e-whiskers, which are comparable in size to a 2 mm long strand of hair. Once assembled, deflections of individual e-whiskers as small as 5 µm can be precisely measured. |
| Arrays of these highly sensitive e-whiskers provide a new method of enabling complex, multimodal sensation in prosthesis and robotics. Replicating human touch in prosthetics would enable amputees to not only restore previous function, but potentially exceed human capabilities. |
| For example, the sensitivity of these e-whiskers to mapping of surface topology, measuring temperature, as well as response time all greatly exceed the capabilities of human skin by a factor of 10. |
| E-skin for robotics would also enable safer interactions between humans and robots by giving them the ability to differentiate between soft/hard, hot/cold, smooth/rough, etc. |
| A 3D electronic assembly technique is used to create arrays of multimodal electronic whiskers. A shape-memory substrate enables reversible assembly of 3D electronics via the application of warm air. Microscale deflections can be sensed with a response time of less than 250 µs, enabling a variety of distinct sensing modes including proximity, texture mapping, surface roughness, material stiffness, force, and temperature. |
| By developing a process for assembling arrays of electronic sensors into 3D structures, scientists can enable new sensing modalities with higher sensitivities than their predecessors. Furthermore, with this process they have the ability to dynamically reposition the whiskers for task- or situation-dependent sensing. |
| "Future challenges are building these types of sensors into formats that are as robust and resistant to damage as the human skin," Reeder concludes. "This is one area where human skin still has the advantage." |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
