| Posted: Apr 25, 2008 |
A gripping tale for nanomanufacturing |
| (Nanowerk Spotlight) Future nanomanufacturing processes will rely on two basic principles: a combination of chemical synthesis and self-assembly on one hand and robotic nanofabrication on the other. While the former is a controlled 'natural' process relying on chemistry and self-organization principles of nature (read more: How falling spaghettis could lead to more complex nanotechnology self-assembly), the latter will be an industrial process similar in concept to today's automated manufacturing assembly lines. |
| Robotic assembly lines in modern factories have come a long way since the early 20th century when Henry Ford first used an assembly line on an industrial scale for his Model T automobile. Nevertheless, the principle is the same. Rather than having a single craftsman or team of craftsmen create each part of a product individually and assemble them together into a single item, an assembly line is a (often completely automated) manufacturing process in which interchangeable parts are added to a product in a sequential manner to create a finished product. |
| While sporadic automation of certain tasks has already begun (for instance, automated microrobotic injection of foreign materials into biological cells), nanotechnology techniques today are pretty much where the industrial world was before Ford's assembly line – a domain of highly skilled artisans and not of automated mass production. It has long been a dream for nanotechnologists that robots could one day be used in an assembly line type of process to manufacture nanodevices. Researchers are beginning to develop the first rudimentary nanomanipulation devices that could lead to future automated manufacturing systems. Now, a team of scientists in Canada have reported the first demonstration of closed-loop force-controlled grasping at the nanonewton level. |
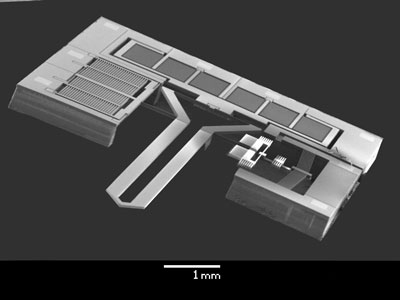 |
| MEMS-based microgripper with integrated two-axis force sensor. (Image: Dr. Sun) |
| "We have demonstrated force-controlled micrograsping of highly deformable cells at a 20 nanonewton force level" Dr. Yu Sun tells Nanowerk. "The contact force feedback of the MEMS-based microgripper enables the micromanipulation system to conduct rapid contact detection at a nanonewton force level and protects the microgripper from breakage. The work clearly explains the importance of the availability of force feedback along multiple directions. The implication is that these microgrippers get us closer to reliable, autonomous micromanipulation." |
| Sun, an Assistant Professor in the Department of Mechanical and Industrial Engineering, Institute of Biomaterials and Biomedical Engineering, and Department of Electrical and Computer Engineering at the University of Toronto in Canada, reports his team's findings in the April 1, 2008 online issue of Journal of Micromechanics and Microengineering ("Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback"). |
| "We are currently applying these force-feedback microgrippers to characterize elastic and viscoelastic properties of polymeric microcapsules (∼20 microns) used for drug delivery and cell encapsulation" Sun explains. "We are also further improving the force sensing resolutions of these microgrippers for sub-nanonewton force measurements, which will enable a new, easy-to-operate technique for our fundamental cell mechanics studies, such as for distinguishing malignant cells from benign cells and for correlating mechanical properties of cells to disease states." |
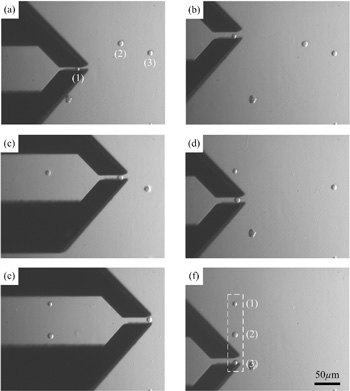 |
| Cell manipulation and alignment with force-controlled micrograsping. (a) After contact detection, the microgripper grasps a first cell. (b) The microgripper transfers the cell to a new position and releases the cell. (c) The microgripper grasps a second cell. (d) Transferring and releasing the second cell. (e) The microgripper approaches a third cell. (f) Transferring and releasing the third cell. Three cells of different sizes are transferred to desired positions and aligned. (Reprinted with permission from IOP Publishing) |
| In order to facilitate the maneuvering of nanoscale materials (e.g., pick-transport-place), Sun's group is further miniaturizing these microgrippers, not so much on the overall device size, but more on reducing the gripping tip thickness and integrating novel mechanisms to facilitate nano-object release by counteracting undesired adhesion forces. |
| "These nanogripping devices under development will promise highly reproducible pick-place of nanoscale objects, a capability the nanorobotics community has been striving for" says Sun. |
| For their microgripper design, the researchers used a V-beam electrothermal actuator to control the opening of the active gripping arm for object grasping. With an applied voltage, the V-beams are heated and thus, expand to produce motion. The microgripper used is a commonly closed type with an initial opening of 5 µm. When actuated, the active gripping arm is pulled open. In order to prevent a high temperature at the gripping arm tips, electrical and thermal isolation on the device silicon layer is implemented, and many heat sink beams are used. The temperature rise at the gripping arm tips caused by the integrated electrothermal microactuator was determined to be tolerable by biological cells. |
| To verify the effectiveness of their force-controlled manipulation system, the team selected biological cells for manipulation due to their high delicacy, high deformability, variations in sizes and mechanical properties. The two key steps in the process is contact detection as the gripper approaches a cell, and the grasping of the cell. |
| "Contact detection is important to protect both the microgripper and the cell from damage" says Sun. "Without the integrated contact force sensor, this process would be extremely time consuming and operator skill dependent. When the monitored contact force level reaches a pre-set threshold value, it indicates that contact between the gripping arm tips and the substrate is established. Subsequently, the microrobot stops lowering the microgripper further and moves the microgripper upward until the contact force returns to zero. After the initial contact position is detected, the microgripper is positioned a few micrometers above the detected contact position." |
| Sun explains that, in order to achieve reliable micrograsping, a closed-loop control system was implemented by using gripping force signals as feedback to form a closed loop. "Enabled by the monolithic microgripper with two-axis force feedback, our system demonstrates the capability of rapidly detecting contact, accurately tracking nanonewton gripping forces, and performing reliable force-controlled micrograsping to accommodate size and mechanical property variations of objects" he says. |
| Besides force-controlled manipulation of biomaterials in liquid, these grippers can also find important applications in biomaterial mechanical characterization and in electronic component handling as well as the assembly of micro objects. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.
