| Oct 06, 2020 |
Shape shifting robots |
| (Nanowerk Spotlight) Of course, most robots can change directions, speeds – some can even change their colors. But what about changing their shapes? Researchers are beginning to create robots that can adapt their morphology and behaviors on demand. By changing both the body shape and the way it moves can help the robot overcome obstacles or continue task performance despite changing terrains and environments. |
| As with so many engineering designs, biology's blueprints serve as inspiration: Biological organisms are able to adjust their body structure, stiffness, and behavior toward a complex anatomy that accommodates a variety of environmental demands and external perturbations. |
| For example, octopuses can squeeze through apertures that are much smaller than their body; hydrostatic caterpillars use peristaltic shape change to locomote across numerous environments; and moth larvae have been observed to curl up to roll away from predators. |
| Moreover, biological bodies are often highly regenerative, and able to repair and reconfigure their large-scale architecture in the face of significant damage or radical changes to their components. For example, salamanders, octopuses, shrimp and starfish regenerate amputated limbs, and fragments cut from arbitrary portions of planaria flatworms can rebuild (and rescale) their bodies to recover a full, correct anatomy. |
| "Evolution did not result in hard-coded body plans purely determined by genetic factors, but rather produced diverse examples of intelligent self-modifying systems which adapt to numerous extragenomic influences," write the authors of a recent progress report in Advanced Materials ("Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization"). "In this way, biology serves as an important proof-of-principle, and design challenge, for artificial intelligence and shape changing robots." |
 |
| Figure 1. Next-generation shape changing soft robots will sense their environment and adjust their shape and behavior to accommodate environmental or terrain changes. (Reprinted with permission by Wiley-VCH Verlag) |
| Numerous organisms successfully exploit shape change as a mechanism for adaptation and survival. However, for robotics designers one fundamental question to start with is that it is unclear when and how robots should change their shape. |
| To address these questions, it would be useful to evaluate a large number of diverse shape changing robots in different environments. However, manufacturing and deploying multiple robots can be expensive, time consuming, and even dangerous. Thus, simulations are often used to weed out undesirable designs before attempting to build them in reality. |
| Yet, as the authors point out, under realistic design conditions, simulations cannot exhaustively search the design space. Even using a small number of mechanical parts, the size of the design space is enormous. "For example, in voxel-based robot simulators, which use voxels as structural building blocks, there are 4.5 × 108 unique ways to arrange 12 voxels to form a robot, and the design space (the number of possible designs) increases exponentially with each additional block. |
| As a result, evolutionary and learning algorithms are usually employed to efficiently explore the vast space of possible robot designs." |
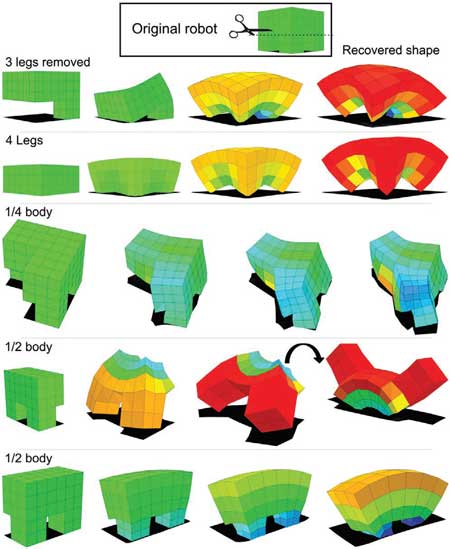 |
| Figure 2. Simulations can automatically generate complex shape changing robots, including ones that recover from damage through shape change. The quadrupedal robot shown here discovered that, after being damaged, it was more advantageous to change its shape than adapt its control policy. (From: 'Robotics: Science and Systems'. ©Sam Kriegman) |
| Moving from simulations to actually realizing shape changing robots in hardware presents its own set of unique challenges. To develop robots rivaling biological systems, several challenges need to be addressed. First, it is unclear how to optimally embed proprioception and intelligence into such machines to enable robots to sense their shape. Additionally, to design robots for tasks more complicated than can be solved through human intuition, it is imperative to automate the design of shape changing robots. Finally, transferring highly functional designs to reality requires functional materials that can be integrated into systems that can attain precise control over shape. |
Shape Sensing |
| During regeneration in biological systems, an organisms' cells compare their body's current state to the target morphology, although the exact mechanisms for these processes are poorly understood. Techniques exist for measuring the deformation of fixed-shape robots, which generally rely on a comparison to the reference body shape at rest. |
| Researchers confront quite a few challenges here: For instance, how many sensors, and what type of sensors, are needed to detect the shape of each robot in Figure 1 above? These sensor devices should be simultaneously robust but flexible to repeated applications of external strain, able to withstand undesired local shear forces, and easy to manufacture at the densities needed to detect the complicated deformations experienced during typical operations. |
Shape Finding |
| This appears trivial, but is not obvious which shape a robot should assume in a given environment. For example: How will a robot know that its current shape is no longer optimal for the environment or situation it is in, and that it should search for a new shape and behavioral policy? How should robot shapes and behaviors be generated given only environmental inputs? |
| The authors note that most studies on simulated morphing ignored the costs of shape change. Although shape change is sometimes more computationally efficient than searching for control policies, in hardware implementations, there is an energetic cost associated with changing shape. Energy must be expended to power actuators and materials may need to be replaced during regeneration or growth. Quantifying both the computational and energetic costs of shape change will be important to the realization of shape changing robots that operate in the real world. |
Shape Changing |
| Typically, a robot’s components are optimally placed for its morphology and target function. Yet, for a shape changing robot, optimal component placement will differ between morphologies. One solution to this problem is to increase the sensor and actuator component density throughout the robot to increase its controllable degrees of freedom. |
| To further expand the range of shapes that morphing robots can attain, additional actuation modes need to be introduced. Many shape changing robots utilize a single actuation mode, for example, tension, volumetric expansion, origami folding, or bending. In contrast, many shape changing organisms exploit multiple actuation modes. For example, the tentacles of cephalopods and many species’ tongues tightly integrate muscles with different orientations to achieve torsion, extension, and bending |
| According to the authors, much can be learned from the field of microrobotics, where many robots have been built using stimuli-responsive polymers. Often these robots contain several actuation modes in addition to novel functionalities, such as camouflage. Stimuli used in these micro-machines – magnetic fields, chemical vapor, light, and solvent – are usually less practical for larger-scale soft robots due to unfavorable strength-to-weight ratios at larger length scales. With additional advances in fundamental materials science, implementation of stimuli-responsive polymers in large-scale robots may become viable. |
| Having reviewed the current state of the literature, the authors conclude that innovations in multifunctional materials, soft robotics, and evolutionary robotics are converging to make shape changing robots more viable. |
| "Such shape changing robots should be viewed as important model systems for evolutionary biology and regenerative medicine, providing simplified 'bodies' in which to test theories of tissue computation, brain–body control, and regenerative algorithms, and in which to abstract the profound lessons of life-as-it-could-be from evolutionary contingencies. Indeed, control of morphology is an unsolved problem in medicine – from fixing birth defects to traumatic injury repair, aging, and cancer. Thus, the question of shape and its dynamic control is an emerging new science at the intersection of evolution, biomedicine, machine learning, and robotics." |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
