| Apr 15, 2024 |
4D Printed robot dances and crawls via temperature shifts (w/video) |
| (Nanowerk Spotlight) Roboticists have long aimed to create machines capable of navigating complex environments and performing sophisticated tasks by replicating the remarkable adaptability and functionality of biological organisms. The animal kingdom is replete with examples of creatures that effortlessly swim, crawl, slither, and scuttle through challenging terrain, powered only by the nutrients they extract from their surroundings. These lifeforms achieve their impressive feats of mobility not through the rigid components, precise controllers, and bulky power sources of conventional robots, but rather through the seamless integration of compliant materials, distributed sensing and actuation, and intimate coupling with their environment. |
| One particularly striking instance of this bio-inspired design approach can be seen in the emerging field of soft robotics. Unlike traditional robots built from hard plastics and metals, soft robots are constructed from pliant, elastic materials that can bend, stretch, and deform in response to their surroundings. This flexibility allows soft robots to navigate tight spaces, conform to delicate objects, and resist damage from impacts or collisions. Soft robots can also more closely mimic the complex, nonlinear motions of living organisms, such as the undulating swimming of jellyfish or the peristaltic crawling of earthworms. |
| However, creating truly autonomous and self-sufficient soft robots has proven challenging. Existing soft robotic systems often rely on pneumatic or hydraulic actuators that require bulky pumps, valves, and tethers, limiting their ability to operate untethered in remote or confined environments. Attempts to create softer, more biologically realistic actuators, such as those based on shape memory polymers or responsive hydrogels, have shown promise but still typically require externally controlled heating, cooling, or electrical stimulation. The ultimate goal of a soft robot that can generate useful work solely by harvesting energy from its environment, like an animal extracting nutrients from food, has remained elusive. |
| Now, a team of researchers from Jilin University in China has taken a significant step towards this vision of truly self-sufficient soft robots. As reported in a paper published in the journal Advanced Functional Materials ("4D Printed Self-Sustained Soft Crawling Machines Fueled by Constant Thermal Field"), they have created a 4D printed soft robot that can crawl and dance using only the temperature difference between a heated surface and the surrounding air. By carefully designing the material composition and geometry of their robot, the researchers were able to achieve self-sustained, lifelike motions without the need for any wires, batteries, or control electronics. |
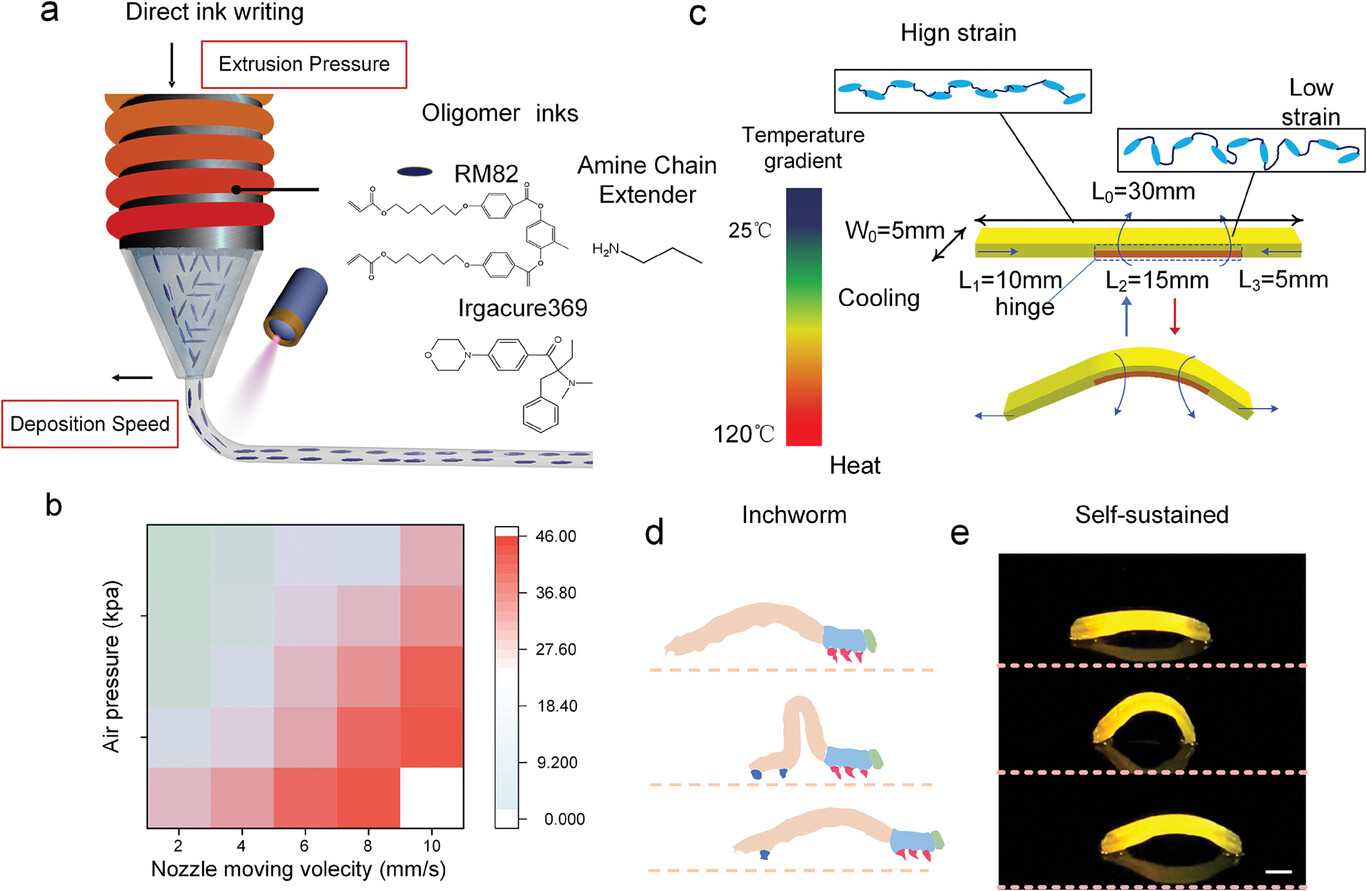 |
| 4D printing of the liquid crystal elastomer (LCE) soft crawling robot. a) Schematic diagram of Hot-DIW 4D printing of LCEs. b) Effect of print speed and air pressure on the actuation strains. c) Dimensions and structural design of the LCE soft robots. d) Forward movements of the inchworm. e) Self-sustained forward movements of the LCE robot. Scale bar: 5 mm. (Reprinted with permission from Wiley-VCH Verlag) (click on image to enlarge) |
| The key to the robot's impressive capabilities lies in its use of liquid crystal elastomers (LCEs), a class of soft, rubbery materials that can undergo large, reversible shape changes when exposed to heat or other stimuli. LCEs contain rod-like molecular units called mesogens that can align in different orientations, allowing the material to contract or expand along specific directions when its temperature is changed. By precisely controlling the alignment of these mesogens during the 3D printing process, the researchers were able to create flat LCE structures that could bend, twist, and deform in predictable ways when heated or cooled. |
| To create a self-propelled robot, the team designed a simple rectangular strip consisting of two LCE layers printed on top of each other. The bottom layer featured an off-center region where the print speed was increased during fabrication, causing the mesogens in this "active hinge" area to be more strongly aligned. When placed on a hot plate, this asymmetric arrangement caused the robot to spontaneously curl up from one end as the active hinge contracted more than the surrounding material. As the raised portion of the robot cooled in the air above the hot plate, it became heavier than the portion still in contact with the heated surface, causing the robot to flop over and continue its crawling motion. |
| By fine-tuning parameters such as the placement and stiffness of the active hinge, the thickness of the LCE layers, and the temperature of the hot plate, the researchers were able to achieve surprisingly sophisticated and lifelike locomotion from such a simple structure. The robot could autonomously crawl forwards, backwards, or in a circle depending on the exact geometry of its hinge and could even navigate rough or squishy terrains like sand and silicone rubber. The team also discovered that flipping the robot upside down would cause it to perform an entrancing "dancing" motion, rocking back and forth as different parts of its body cycled through heating and cooling phases. |
| The implications of this 4D printed soft robot extend beyond its immediate performance as an artificial inchworm. The study showcases the immense potential of responsive materials like LCEs and advanced manufacturing techniques like multimaterial 3D printing to create machines that blur the boundaries between the living and the inanimate. By using stimuli-responsive materials to directly transduce changes in environmental energy into useful mechanical work, the researchers point the way towards robots that could operate continuously and autonomously in remote or extreme environments, powered only by waste heat, sunlight, or chemical gradients. |
| Moreover, the ability to 3D print soft robots with heterogeneous, precisely controlled material properties opens up new possibilities for embedding sensing, actuation, and computation directly into their bodies. Much like biological organisms, future soft robots may be able to process information and adapt their behavior using only the intelligence distributed throughout their material structure, without the need for a central controller or indeed any traditional electronics at all. Combined with ongoing advances in fields like embodied cognition and developmental robotics, such "robotic materials" could one day lead to truly lifelike artificial creatures that grow, learn, and evolve in response to their environment. |
| A race-chase scenario featuring two LCE robots. |
| The 4D printed inchworm robot developed by the Jilin University team offers an exciting glimpse into this biomimetic future. Though still far from matching the agility and versatility of even the simplest animals, it represents an important proof-of-concept for environmentally powered, materially intelligent soft machines. With further research into adaptive materials, additive manufacturing, and bioinspired design, we may one day see robots that can nimbly navigate any terrain, deftly manipulate any object, and autonomously carry out complex missions in space, in the oceans, or even inside our own bodies - all while being as safe, sustainable, and lifelike as the organisms that inspired them. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
