| Posted: Nov 26, 2008 |
Nanotechnology gets a grip |
| (Nanowerk Spotlight) Nanotechnology researchers are actively working on the beginnings of various nanorobotic systems that one day could lead to automated, assembly-line type nanofabrication processes. Last year we reported on a nanogripper, a kind of a robotic 'hand' some ten thousand times smaller than a human hand. This 'pick-and-place' device used a silicon gripper which was controlled by a nanorobotic arm and was capable of picking up a carbon nanofiber and fix it onto the tip of an atomic force microscope cantilever. One of the problems that is vexing researchers is that the nanoscale miniaturization of these grippers comes at the cost of reduced strength – the smaller the gripper, the weaker it becomes. Therefore what is needed is a gripper design that is strong enough yet sufficient flexible and small to handle tough materials like carbon nanotubes. |
| "Finding the right shape of the gripper 'muscles' – the actuator – is a serious problem" Peter Bøggild tells Nanowerk. "We previously found that electrothermal actuation –heating up doped silicon to make it expand – makes highly compact, yet fairly strong grippers possible. After years of trying and failing, we have found that grippers that are delicate enough to manipulate nanotubes and nanowires in a practical way are simply not strong and robust enough. We could simply not make them strong and small at the same time." |
| We reported about Bøggild and his team's early nanogripper design in a previous Spotlight (Hands-on nanotechnology: towards a nanorobotic assembly line). |
| Bøggild is an associate professor and leader of the Nanointegration Group at the Department of Micro and Nanotechnology at the Technical University of Denmark (DTU). Working with some of the team members from the earlier report ("A carbon nanofibre scanning probe assembled using an electrothermal microgripper), the scientists in Denmark and Germany have now demonstrated a much improved design for electrothermal microgrippers that can be integrated into a nanorobotic system and can be used for serial device assembly. They reported their findings in the November 18, 2008 online edition of Nanotechnology ("Rapid prototyping of nanotube-based devices using topology-optimized microgrippers). |
| Bøggild explains that one of his colleagues at DTU, Ole Sigmund, is doing highly fascinating work on topology optimization, and this turned out to be a very powerful technique for addressing his team's nanogripper design problem. |
| "We took an earlier gripper design, a dual (open/close action) actuator, and applied the topology optimization algorithm – it basically figures out the shape that best maximizes certain goals, while obeying the boundary conditions. We just have to tell it: here and here we apply currents, and this point over there should have a large actuation and a large force." |
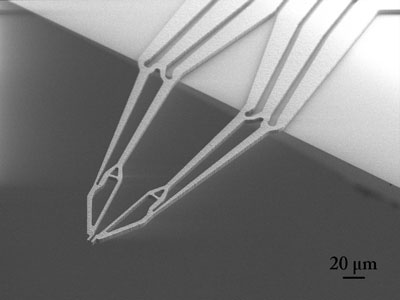 |
| Overview of the free-hanging topology-optimized microgripper pointing out from the front edge of the chip. (Image: Özlem Sardan, DTU) |
| The algorithm ignores aesthetic and engineering traditions and habits, it just optimizes the shape to maximal performance. Strangely, the design resembles a human bone structure, even incorporating a wrist-like structure to amplify the movement of the end-effector (the fingers) of the gripper. |
| As a result, Bøggild and his colleagues now have a gripper that is about fifty times stronger than the previous design, has similar actuation range, and similar size. This new design provides a viable route to fast prototyping and even small scale manufacturing of nanotube-based devices, resembling industrial macroscale robotic assembly lines. |
| Topology optimization is a finite-element-based method which relies on the redistribution of a given amount of material in a well-defined design domain, using gradient-based deterministic optimization algorithms, which often leads to vastly different topologies than conventional approaches, and with superior performance. The two-dimensional (2D) topology optimization procedure used by Bøggild's team is based on the approach described in Sigmund's paper "Design of multiphysics actuators using topology optimization ? Part I: One-material structures ". |
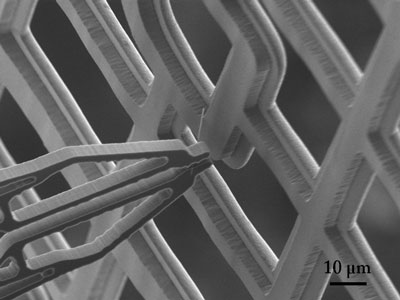 |
| Microgrippers approaching the TEM grid with the picked CNT. (Image: Özlem Sardan, DTU) |
| Applying this optimization methodology, the team introduces several design improvements and demonstrates that the gripper is capable of picking and placing carbon nanotubes with great predictability. |
| Bøggild tells us that, using the topology-optimized microgrippers in their further developed nanorobotic system, the DTU group together with nanorobotics experts at the Division Microrobotics and Control Engineering at Oldenburg University in Germany, were able to demonstrate reproducible and consecutive nanomanipulation and assembly of carbon nanotubes (CNTs) for different purposes: onto AFM cantilevers (for high aspect ratio AFM tips), on TEM grids (for characterization in transmission electron microscope), and on electrodes. "These are three useful and pretty generic nanoassembly tasks. This is the first attempt at serial fabrication of carbon nanotube devices using nanomanipulation." |
| This work is done in the framework of the European project NANOHAND, which ambitiously aims at not just making nanoassembly possible, or facilitate nanoassembly, but actually build equipment and methodology that does nanoassembly, i.e. to build a prototype nano-assembly line. |
| The scientists' aim is to be able to assemble carbon nanotubes on AFM tips at least semi-automatically. The project combines 3D electron microscopy, image recognition, state-of-the-art robotics and nanogrippers, and unites European companies with interest in nanotechnology and nanomanufacturing with leading European research institutions in the field. |
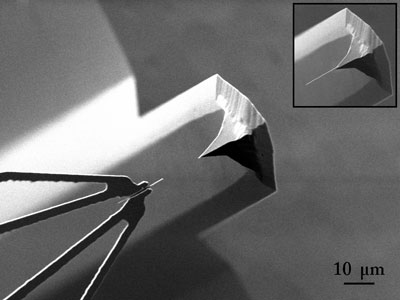 |
| Reproducible assembly of CNT-enhanced AFM super-tips using topology-optimized microgrippers. (Image: Özlem Sardan, DTU) |
| "The nanorobotics people in the consortium are taking fascinating approaches," says Bøggild. "They are building two types of setup – a 'nano-fab' which is a commercial stationary robot system inside a scanning electron microscope aiming at serial fabrication and prototyping; and a more experimental 'nano-lab' that, among others, features cubic centimeter sized mobile robots from EPFL in Lausanne that 'drive around' on a surface and can collaborate – some of them equipped with our nanogripper. These are really robots in a traditional sense – they look like small tanks with arms." |
| He points out that mechanical testing is another obvious application area. "Using the topology optimization design approach, we can relatively easily design the tools to perform according to a range of requirements – in other words, we can customize them." |
| What is so exciting about the NANOHAND project approach is that it shows a real path from lab to fab: the project results are immediately relevant for prototyping of nanotube, nanowire and nanomaterial devices, perhaps even small scale fabrication. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.
