| Jul 21, 2014 |
Origami wheel robot (w/video)
|
|
(Nanowerk News) Origami is the traditional Japanese art of paper folding. The unique characteristic of origami that realizes three-dimensional structures from two-dimensional materials have long attracted attention from various fields such as design, education and mathematics. Many of today's engineers are using this oriental art to solve problems. It can be used as an inspiration to some architectural designs, and can also be used as fabrication method of robot design or MEMS process.
|
|
Transmissions play a vital role in machines by transforming the torque and speed of a motor into a desired output. They are often necessary for operating a motor at peak efficiency or power. The majority of variable transmissions are mechanically complex, large, and expensive, which limits scalability and is often cost prohibitive.
|
|
As an alternative, researchers from the BioRobotics Lab at Seoul National University propose an origami-wheel design that is capable of varying its own transmission ratio between motor torque and ground reaction force, effectively creating a passive, continuously variable transmission. The wheel responds to an increase in torque by reducing its radius through the spring-like properties of the origami structure, increasing the force applied by the wheel to the ground.
|
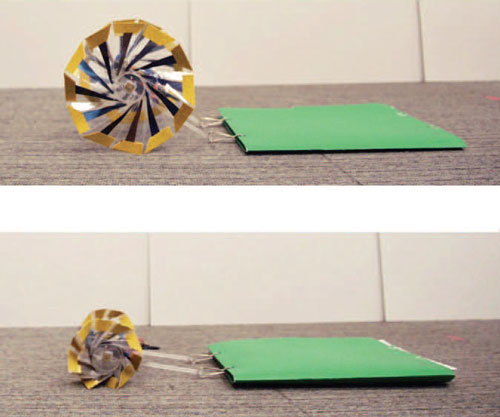 |
| The origami-inspired wheel passively adjusts the torque-force transmission ratio by altering its radius in response to a tangential load. Top: high speed, low force; bottom: low speed, high force.
|
|
By using this origami structure, the deformable wheel can be built without using many mechanical parts; the wheel is built with a single piece of sheet, with specific folds. Moreover, because of the characteristic that the structure constrains its own movement, it is possible to control the shape of the wheel using only a few actuators.
|
|
The team demonstrates that the wheel is able to match the speed of a 55 mm fixed-radius wheel when unloaded, and can also tow loads as high as a 25 mm wheel without stalling.
|
|
This design could be used to provide smaller, cheaper robots with an effective means to vary their output while maintaining motor efficiency.
|
|
|
|
When the robot rusn into the small slit smaller than the wheel diameter, the robot can deform the wheel and it is possible to get through the terrain. The proposed design for the deformable wheel shows the possibility of using origami structure as a functional structure with its own mechanism.
|
|
The results have been published in a paper presented at the 2014 IEEE International Conference on Robotics & Automation (ICRA): "A Passive, Origami-Inspired, Continuously Variable Transmission" (pdf).
|