Click beetle-inspired robots jump using elastic energy (w/video)
(Nanowerk News) Researchers have made a significant leap forward in developing insect-sized jumping robots capable of performing tasks in the small spaces often found in mechanical, agricultural and search-and-rescue settings.
A new study led by mechanical science and engineering professor Sameh Tawfick demonstrates a series of click beetle-sized robots small enough to fit into tight spaces, powerful enough to maneuver over obstacles and fast enough to match an insect’s rapid escape time.
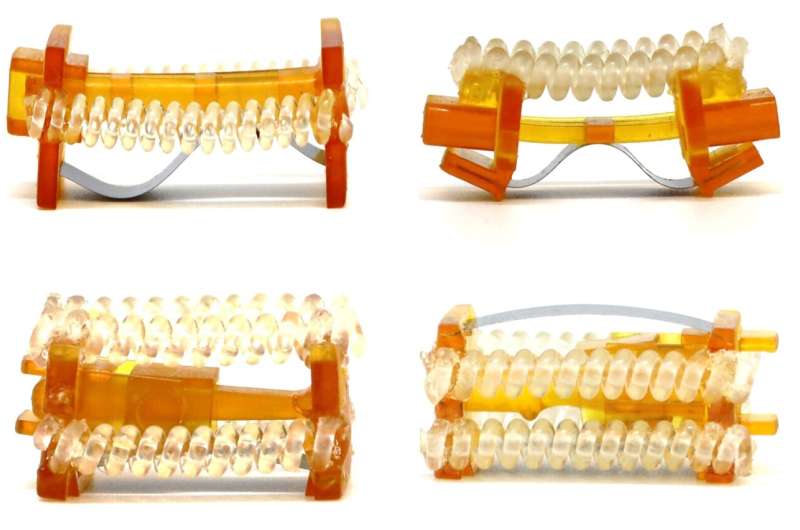
Jumping mechanisms of four beetle-sized robots. (Image: Yuzhe Wang)
Researchers at the University of Illinois Urbana-Champaign and Princeton University have studied click beetle anatomy, mechanics and evolution over the past decade. A 2020 study (PNAS, "Nonlinear elasticity and damping govern ultrafast dynamics in click beetles") found that snap buckling – the rapid release of elastic energy – of a coiled muscle within a click beetle’s thorax is triggered to allow them to propel themselves in the air many times their body length, as a means of righting themselves if flipped onto their backs.
“One of the grand challenges of small-scale robotics is finding a design that is small, yet powerful enough to move around obstacles or quickly escape dangerous settings,” Tawfick said.
In the new study, Tawfick and his team used tiny coiled actuators (Science, "Stronger artificial muscles, with a twist") – analogous to animal muscles – that pull on a beam-shaped mechanism, causing it to slowly buckle and store elastic energy until it is spontaneously released and amplified, propelling the robots upward.
“This process, called a dynamic buckling cascade, is simple compared to the anatomy of a click beetle,” Tawfick said. “However, simple is good in this case because it allows us to work and fabricate parts at this small scale.”
Guided by biological evolution and mathematical models, the team built and tested four device variations, landing on two configurations that can successfully jump without manual intervention.
This video shows high-speed camera video frames of the actuator snap-through and the ground interaction process for the SyP and SyP+, the highest jumping designs of the variations of the click beetle-inspired robots that the team fabricated.
“Moving forward, we do not have a set approach on the exact design of the next generation of these robots, but this study plants a seed in the evolution of this technology – a process similar to biologic evolution,” Tawfick said.
The team envisions these robots accessing tight spaces to help perform maintenance on large machines like turbines and jet engines, for example, by taking pictures to identify problems.
“We also imagine insect-scale robots being useful in modern agriculture,” Tawfick said. “Scientists and farmers currently use drones and rovers to monitor crops, but sometimes researchers need a sensor to touch a plant or to capture a photograph of a very small-scale feature. Insect-scale robots can do that.”