| Posted: Apr 16, 2018 |
Driving nanomotors through road blocks inside living cells |
| (Nanowerk Spotlight) Artificial nano- and microrobots have gained huge interest in biomedical applications, which include targeted drug delivery, nano sensing, therapeutics, nano surgery etc. Researchers around the world are trying to make various types of nanorobots for different biomedical purposes. |
| Nanorobots are extremely small devices, which can be maneuvered remotely by providing appropriate external stimulus, such as electric and magnetic fields, acoustic waves and light. They have the potential ability to move deep into tissue and release a therapeutic drug by sensing the surrounding environment. Researchers are especially interested in applying these techniques to cancer therapeutics due to the ability to deliver drugs at the diseased site with high efficiency. |
| A recent work reported in Advanced Materials ("Maneuverability of Magnetic Nanomotors Inside Living Cells") demonstrates that helical shaped magnetic nanomotors can be maneuvered inside a living cell. |
| In the past, researchers had tried to actuate gold nanorods inside biological cells, but they never managed to move them in a well-controlled manner as the intracellular environment is a highly heterogeneous medium. Apart from being heterogeneous, the intracellular matrix is anisotropic, i.e. properties are different if we measure it from different directions, and it also changes with time. |
| That is why we have fabricated these novel nanostructures and engineered a strategy to manipulate them inside a cell in a controlled fashion. |
| This new and versatile technique has the potential ability to position any payload at any desired location inside a living cell itself, which is of great importance in the field of biology and biophysics. |
| With our technique, we think it will be possible to explore many new avenues in understanding the intracellular environment. |
| Our helical shaped nanomotors are made of mainly silica and a thin layer of magnetic material, while their size is at least ten times smaller than the cell which they enter in. |
| On entering the cell cytoplasm, the nanomotor encounters a highly complex, heterogenous environment. We used a rotating magnetic field to drive the motors inside the cytoplasm with precise control. Magnetic fields, which are widely used in biomedical imaging techniques such as MRI, are known to be completely benign to living systems. |
| Due to the nature of the cellular interior, nanomotors often detoured from their path in order to move around intracellular roadblocks. But our newly developed strategy can lead to controlled propulsion of the nanomotors inside the cell in spite of these obstacles. |
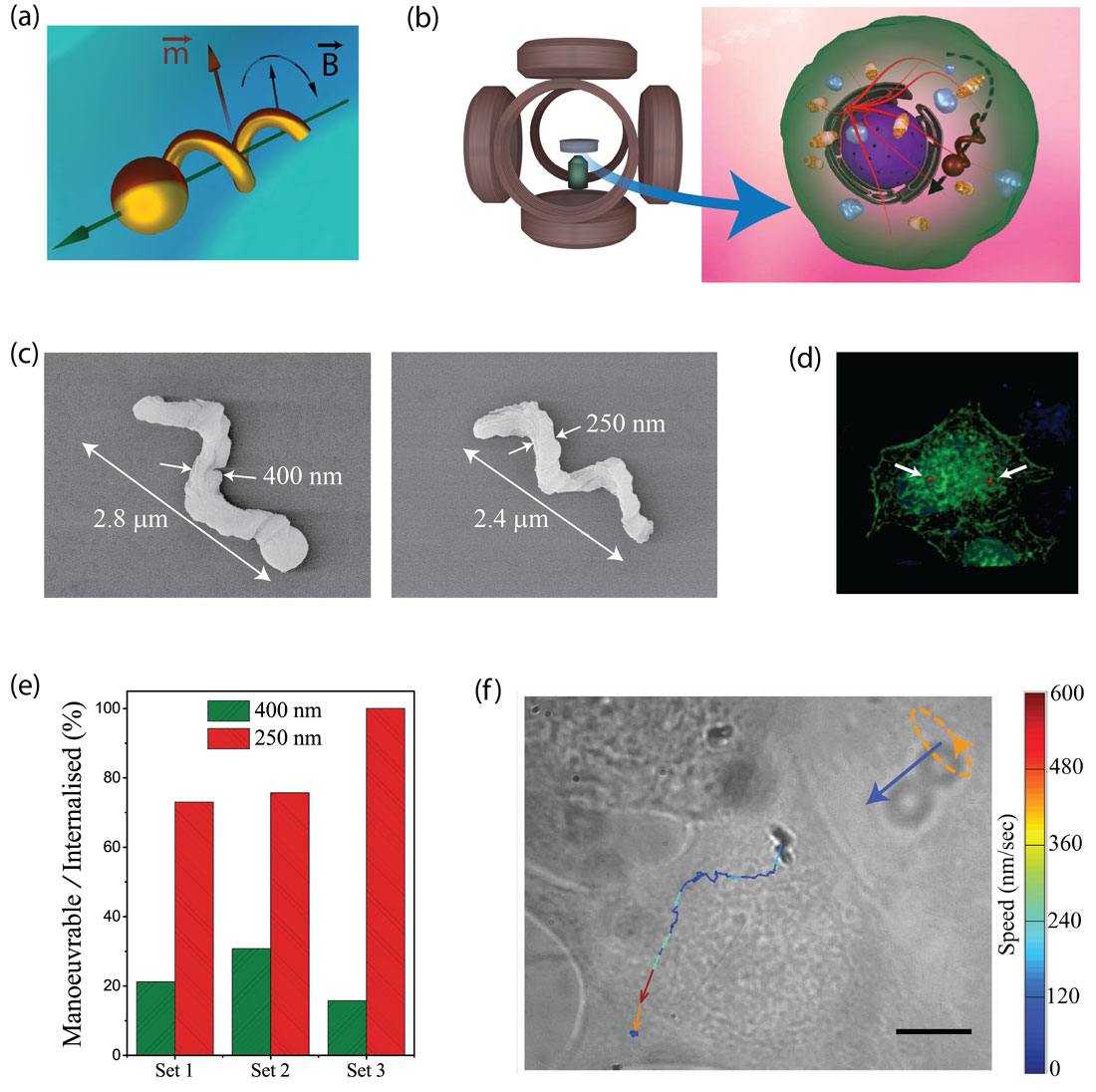 |
| Design and manipulation of helical nanomotors inside cells. (a) Schematic of the actuation scheme, where the helix rotates in sync with the magnetic field, such as to keep the permanent magnetic moment aligned with the applied field. The rotation results in translation of the helical nanomotor. The helical shape is predominantly made of SiO2 (yellow), with a thin film of magnetic material (here iron, brown) deposited on the SiO2. (b) Schematic of the experiment: Petri dish containing the cells and the helical nanomotors are placed in a triaxial Helmholtz coil built around an optical microscope. The motion of the motors travelling through the intracellular space is recorded and analyzed. (c) SEM image of nanomotors. Left panel: larger: 400 nm × 2.8 µm, right panel: smaller: 250 nm × 2.4 µm. (d) Single HeLa cell containing two nanomotors, a snapshot of a 3D rendered video (movie M1) made from a stack of confocal images. Blue, nucleus; green, actin filaments and red, nanomotors (pseudo colored). The scan region dimensions were 64 µm x 51 µm x 7 µm. (e) Ratio of manoeuvrable to total number of nanomotors that were internalized by the HeLa cells, for the two designs. Results from multiple experiments show higher manoeuvrability with the thinner motors. (f) Vector plot of speed of a nanomotor moving inside a cell (BAEC), scale bar 5 µm. Also shown is the intended direction of the motor as defined by the rotating magnetic field (top right corner). (Source: M. Pal, N. Somalwar, A. Singh, R. Bhat, S. M. Eswarappa, D. K. Saini, A. Ghosh, Adv. Mater. 2018, 1800429. Copyright Wiley-VCH Verlag GmbH & Co. KGaA. Reproduced with permission.) (click on image to enlarge) |
| Due to the interdisciplinary nature of the work, scientists from different backgrounds (Centre for Nano Science and Engineering, Department of Molecular Reproduction and Department of Biochemistry) came together to achieve the research objective. The Optics, Nanostructures & Quantum Fluids Laboratory of Prof. Ambarish Ghosh at the Indian Institute of Science is one of the pioneers in the field of helical magnetic nanorobots. |
| One of the important aspects of our nanomotors is that it becomes possible to sense viscosity of the medium that surrounds them. |
| A previous paper from Prof. Ghosh’s lab showed how one can measure viscosity of the medium by analyzing the dynamics of these nanomotors ("Helical nanopropellers to measure local viscosity in a fluid"). This is important in the sense that we can measure viscosity of the medium without any modification to the nanomotors. This is how these tiny motors can be used in nano sensing application which is unique in its own. |
| The nanomotors are also capable of delivering a payload to a specific pre-determined location with high precision and speed. There is one more paper from Prof. Ghosh’s group which reported that it is possible to trap a payload with these nanostructure by coupling it with plasmonic, a special kind of light matter interaction ("Manipulating colloids with mobile nanotweezers"). |
| Using this technique, one can selectively pickup, transport, release, and position any object in a desired location, which proves its ability to be used as a tool for targeted drug delivery. |
| In summary, these tiny robots have all the potential to be a unique tool in medical interventions of the future. |
| We should mention here that although most of these results have been achieved in a research environment, we see the present work as significant step towards next-generation therapeutics and believe that these nanomotors will be used, very soon, in a clinical environment where they can be swallowed, inhaled and injected into patients' bodies and thereafter, using external actuation, it would be possible to guide them to the targeted location in a non-invasive manner. |
| Though these are very interesting achievements, there are few more challenges for future autonomous and non-invasive therapeutics. The main challenge is to image these nanomotors while they are moving deep inside a tissue. Prof. Ghosh’s group has already started to find the possible solution for this particular problem. |
|
By Malay Pal, PhD Research Scholar, Centre for Nano Science and Engineering (CeNSE), Indian Institute of Science, Bangalore, India
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
