| Apr 04, 2022 |
Shape-shifting slimebots (w/video) |
| (Nanowerk Spotlight) Soft robotics is a fairly young sub-category of robotics, which combine classical principles of robot design with the study of fluids, gels, soft polymers, and other easily deformable matter. |
| At the core of many soft robotics platforms are stimuli-responsive materials that exhibit excellent shape or volume recovery properties under different external stimuli, which are key for creating mechanical motion rapidly and precisely. |
| Most magnetically actuated soft-bodied robots so far have been fabricated from soft elastomers mixed with hard magnetic particles. The functionality of these designs is limited by their preconfigured shapes and their limited deformation capabilities. |
| More recently, small fluid-based robots based on liquid metal or ferrofluid have demonstrated better deformability than elastomer-based soft robots owing to their fluid flow properties that allow them to easily pass through extraordinarily narrow and restricted spaces and avoid damaging surrounding biological tissues. One of their major drawbacks, though, is that they require very demanding operating environments. |
| "Given the disadvantages of existing soft robotic platforms, we set out to combine the characteristics of large deformations of liquid-based robots with the complex interface adaptability of elastomer-based robots to create novel soft robots," Li Zhang, a Professor in the Department of Mechanical and Automation Engineering at The Chinese University of Hong Kong, and a PI in the Multi-scale Medical Robotics Centre (MRC) at the Hong Kong Science Park, tells Nanowerk. |
| The result of this effort is a gel-like magnetic soft robot – the slime robot. The viscoelastic property makes this soft actuator sometimes behave like fluid, and sometimes behave like a solid. It exhibits high transformation and locomotion adaptability to diverse environment in air and in liquid, and it is capable of performing varied remote manipulation like a robotic hand. |
| The results have been published in Advanced Functional Materials ("Reconfigurable Magnetic Slime Robot: Deformation, Adaptability, and Multifunction") |
| Under the control of a magnetic field, the slime can navigate freely through narrow channels. (Video: Dr. Mengmeng Sun) |
| "Key to our work is the viscoelastic property of the gel-like non-Newtonian material that we used," Zhang explains. "Combined with the magnetization character of its internal magnetic particles, this endows it with remarkable deformability and reconfigurability." |
| The magnetic slime is fabricated by sequentially adding magnetic nanoparticles (NdFeB) and borax to a polyvinyl alcohol. The researchers point out that magnetic slime consists of more than 90 wt% water, implying that it is essentially a hydrogel. |
| "Magnetic slime has both active and passive deformation capabilities, and its shape can be changed by altering the external magnetic field or it can be adapted to environmental boundaries using rheological properties," Zhang notes. "Consequently, in comparison with existing liquid-based robots, magnetic slime robots can adapt to complex interface environments, such as water or air, and can also achieve on-demand complex shape deformations and programmable behaviors such as curling operations." |
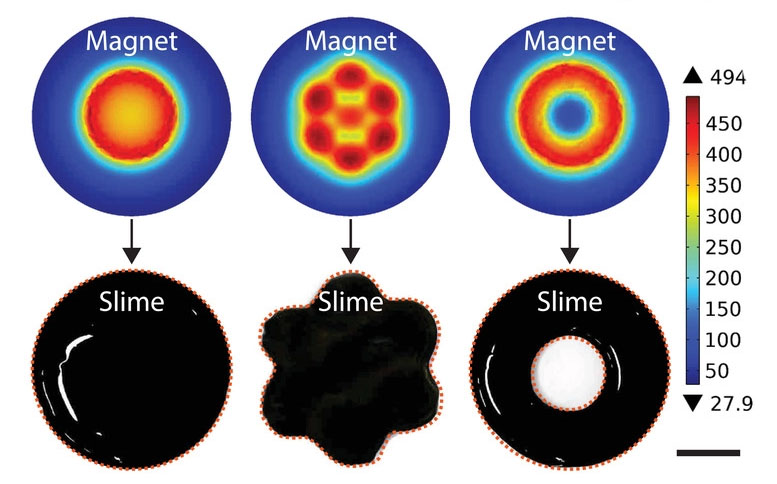 |
| Programming complex shapes of the magnetic slime using ferromagnets in disk-, hexagon-, and ring-shapes. The simulation results demonstrate the magnetic field distribution in the plane 2 mm above the magnet. Scale bar: 15 mm. (Reprinted with permission from Wiley-VCH Verlag) |
| Combining the benefits of both fluid and solids, the team demonstrated various functions for their slime robots, including navigation in narrow channels much smaller than their size; object capture operations via the curl or endocytosis modes; and circuit repair and controlled switching using their own conductive properties that can even be reconfigured as self-healing strain sensors for monitoring human motion. |
| For example, electronic devices may fail because of partial disconnection if they are corrupted by a long-term environment or are scratched by sharp objects. As illustrated in the video below, the circuit repair process comprises three steps: stretching, spreading, and curling. The repaired circuit then functions properly again. |
| Video: Dr. Mengmeng Sun) |
| The widely applicable working environment of these novel magnetic slime robots, as demonstrated in this work, as well as their largely deformable, reconfigurable, self-healing, and conductive properties, make them promising for future applications in biomedical and wearable devices. |
| "Soft robotics is a hot research topic right now but yet many hard questions/challenges need to be addressed," Zhang concludes. "The bridging of soft matter and computational intelligence for the development of intelligent soft robots, and to sort out their killer applications, will be very interesting and challenging for the research community." |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
