| Jul 25, 2022 |
Novel platform allows five types of programmable optothermal manipulation of micro- and nanoparticles |
| (Nanowerk Spotlight) The Nobel Prize in Physics 2018 was awarded for groundbreaking inventions in the field of laser physics with one half to Arthur Ashkin 'for the optical tweezers and their application to biological systems'. What Ashkin had found back in the 1970s was that radiation pressure – the ability of light to exert pressure to move small objects – could be harnessed to constrain small particles (see the original 1970 paper: "Acceleration and Trapping of Particles by Radiation Pressure"). |
| Over the years, researchers in the fields of biology and chemistry have also developed techniques to use sound waves (acoustic tweezers) and magnetic force (magnetic tweezers) to trap and move small objects without touching them. Whereas these two types of tweezers offer the capability of multimodal manipulation, the existing optical tweezer systems and other optical manipulation techniques only afford single-mode or dual-mode manipulation (i.e., translation and rotation) and typically required designed intensity profiles and complex polarization dynamics. The limited modes and those requirements make it challenging for optical manipulation to achieve complex and realistic tasks (such as nanosurgery, for instance). |
| It is the limitation of optical tweezers that motivates a group of researchers at the University of Texas at Austin, to develop a one-stop optothermal manipulation method for versatile manipulation of various micro- and nano-objects. The ultimate goal of their work is to expand the manipulation modes of optical tweezers in order to develop optical manipulation platforms into robotic systems that are capable of performing a wide range of tasks in an autonomous way. |
| As the team now reports in ACS Nano ("Programmable Multimodal Optothermal Manipulation of Synthetic Particles and Biological Cells"), they have developed an optothermal platform with five manipulation modes – printing, tweezing, rotating, rolling, and shooting – using a single Gaussian laser beam. Switching between the different modes is achieved by simply tuning the optical power or the distance between laser and object, and can be automated through software programming. |
| This novel multimodal manipulation technique relies on the coordination of multiple thermal forces instead of light-matter interactions, i.e., the mechanism of traditional optical tweezers. |
| "Our multimodal manipulation platform can be used for synthetic micro- and nanoparticles as well as live cells and we also demonstrate its promising potential in single-cell characterizations," Hongru Ding, a Graduate Research Assistant in Yuebing Zheng's Research Group, and the paper's first author, tells Nanowerk. "It is our hope that this programmable multimodal optothermal platform will contribute to diverse fundamental studies and applications in cellular biology, nanotechnology, robotics, and photonics." |
| As shown in Figure 1 below, the multimodal manipulation relies on the synergy of three thermal forces – depletion force (FD), thermoelectric force (FTE), and electrokinetic force (FE) – generated in a non-uniform temperature field by illuminating a light-absorbing substrate with a low-power laser beam. FD and FTE are used to control the translational movement of the target and FE is used to control the rotational movement. |
 |
| Figure 1. Working principle of multimodal optothermal manipulation platform. (a) Working principle of tweezing mode: (i) a non-uniform temperature field. (ii) PEG molecule, BSA protein, Na+ and Cl- ions. (iii)-(iv) For clarity, only five temperature gradient lines (white dash arrows) are plotted to show the directions of the temperature gradient with the inset color bar (top) indicating the magnitude of temperature. (b) Printing of the particle is achieved by an enhanced FD powered by a higher input laser power. D is defined as the distance between the laser beam and the particle. When the particle is within a specific distance away from the laser spot, an electrokinetic torque (ME) can also be generated (curved black arrow). Thus, by modulating the distance between the laser beam and the particle (i.e., increasing the D gradually), the particle can exhibit rotating (c), rolling (d), as well as shooting without any rotation (e), which stems from the direction and magnitude change of FD, FTE, and FE. Optical intensity: 0.1 mW/µm2. (Reprinted with permission by American Chemical Society) (click on image to enlarge) |
| As illustrated in Figure 1 above, this is how this optothermal manipulation technique works in detail: In the non-uniform temperature field, PEG molecules, Na+ and Cl- ions diffuse to the cold region and generate concentration gradients (i). The PEG concentration gradient leads to an unbalanced osmotic pressure and thus a downward force (FD) on the particle (yellow arrow). Na+ and Cl- ions separate during the thermophoresis process, which generates a thermoelectric field, exerting a repulsive force (FTE) on the particle. |
| In addition, the temperature field affects the dissociation of carboxylic function groups, thus a non-uniform surface charge on the particle, as shown in the inset color bar. With BSA molecules on it, the substrate also shows a non-uniform surface charge (iii and iv), which exerts an outward force (FE) on the particle (pink arrow). The particle is trapped in the hot region (tweezing mode) when FD is larger than the sum of FTE and FE. Specifically, TE force and depletion force fix the object in space, meanwhile the thermo-electrokinetic interaction between the object and substrate powers the rotation. |
| "The adhesion of a receptor to a ligand on cell surfaces mediates cell???cell and cell-environment communications and plays a crucial role in a variety of cellular events that involve proteins, carbohydrates, and phospholipids," Ding explains. "For instance, the first step of inflammatory response is the rolling adhesion (i.e., rolling followed by adhesion) of hematopoietic cells on vascular surfaces at infected or injured sites. Fungi and bacteria infect a host by rolling near endothelium and then attaching to the epithelial cells through the adhesion force between the cell surfaces." |
| "Most of the existing single-cell assays can precisely measure the cellular adhesion dominated by tensile forces," he continues. "However, they are not able to capture the shear kinetics of the rolling cells. With the capability of versatile control of both translational and rotational motions of cells at nanometer resolution, our multimodal micro/nanomanipulation platform provides an effective approach to filling this gap." |
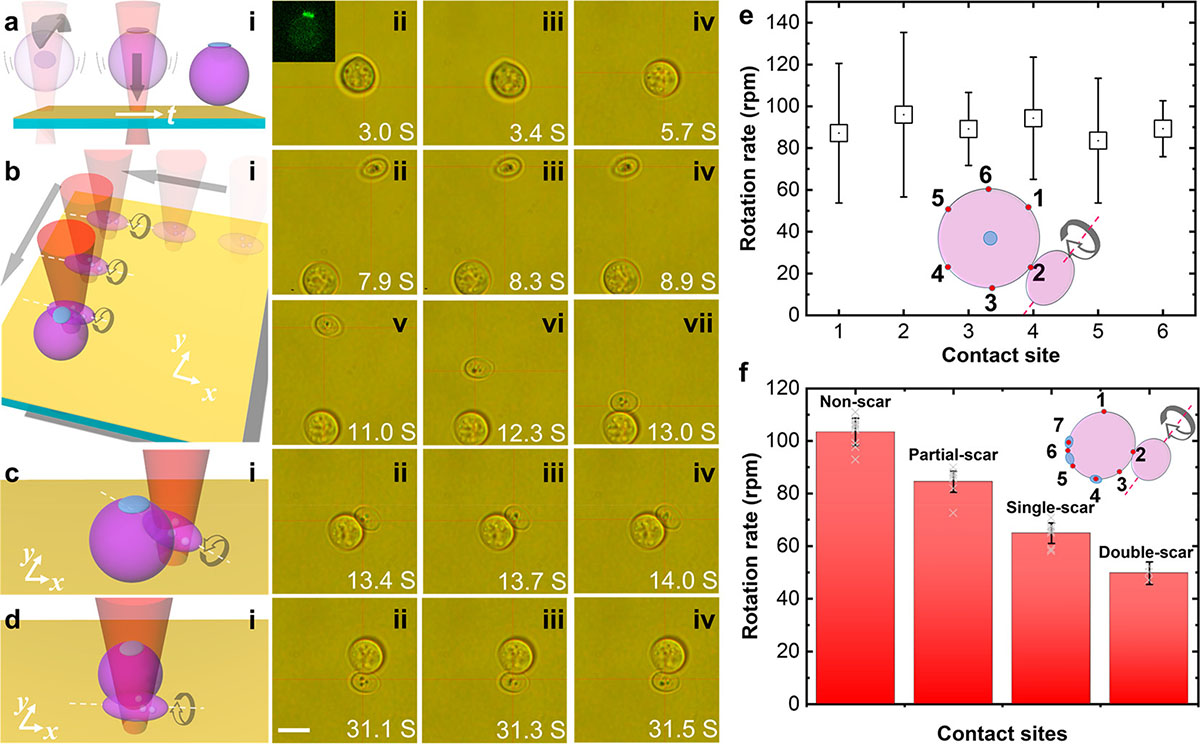 |
| Figure 2. Multimodal manipulation of cells for in-situ three-dimensional surface characterization at sub-cellular resolution. (a) Schematic and time-solved optical images demonstrating the rotation and printing of the target yeast cell (the white arrow is a time axis). Once printed onto the substrate, the cell did not move. Inset of (ii): the fluorescent image of the target yeast cell captured at this moment showing the position of the bud scar region (i.e., bright green region). (b) Schematic (i) and successive optical images (ii-vii) showing the tweezing and rolling of the probe yeast cell, which enables the probe cell to approach the target efficiently. (c) and (d) Schematics (i) and successive optical images (ii-iv) of the rotation of the probe cell contacting the target cell at the different sites, which enable us to capture the shear kinetics of the cell adhesion dominated by hydrophobic interactions. The linear and curve arrows in the schematics of (a)-(d) indicate translational and rotational motions. Scale bar: 10 µm. (e) Measured rotation rates of the probe cell contacting the target cell at the six sites in non-scar regions (marked by the red dots in the inset schematic). The scar region was rotated to the top as marked by the blue region in the inset schematic. (f) Measured rotation rates of probe cells contacting target cells at sites in non-scar and bud scar regions. Inset: an illustrative schematic of the three-dimensional cell surface characterization at sub-cellular resolution. Blue regions - bud scars; red dots - contact sites. The dashed line and curve arrow indicate the rotational direction of the probe cell. #1-#3 are non-scar contact sites; #5 is a partial-scar site; #4 and #7 are single-scar sites; #6 is a double-scar site. The rotation rates were obtained from 4 pairs of yeast cells. (Reprinted with permission by American Chemical Society) (click on image to enlarge) |
| The team's current optothermal multimodal manipulation platform is primarily a two-dimensional operation platform because of the requirement for a light-absorbing substrate. However, they have already begun developing a three-dimensional manipulation platform by using optical fibers coated with photothermal layers. |
| Ding notes that the multimodal manipulation of cells in vitro in native biofluids (e.g., plasma) is feasible as long as the biofluids contain ions and biomolecules for the formation of electric and osmotic fields. "By exploiting surface chemistry to modify the optothermal substrates to be either positively or negatively charged, one can apply the platform to manipulate synthetic particles and live cells of any type of surface charge," he points out. |
| Dynamic patterning using four 2 µm polystyrene particles (2?? original speed). (Video courtesy of the researchers |
| "We believe that our versatile platform will serve as a powerful toolbox for applications in colloidal science, cell biology, nanomaterials, and micro/nanorobotics, either functioning in one single mode or operating in multiple modes," he concludes. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
