| Oct 30, 2023 |
Scientists develop soft robotic skin that mimics human touch by sensing object consistency |
| (Nanowerk Spotlight) Human skin is remarkably complex, containing an array of receptors that provide detailed sensory information about our environment through the sense of touch. One unique feature is the ability to perceive an object's compliance – its ability to deform under pressure - or softness, by combining sensory signals from skin receptors with kinesthetic feedback, the information sensed when manipulating or moving the object, during manipulation. This allows us to explore object properties and perform delicate tasks like medical palpation. |
| Equipping robots with similar haptic perception has proven challenging, however, due to their rigid construction. |
| Now researchers at the Ecole Polytechnique Fédérale de Lausanne (EPFL) in Switzerland have developed a soft artificial sensory skin that can accurately determine an object's compliance across a wide range. |
| They report their results in the journal Advanced Functional Materials ("Liquid Metal-Based Sensor Skin Enabling Haptic Perception of Softness"). |
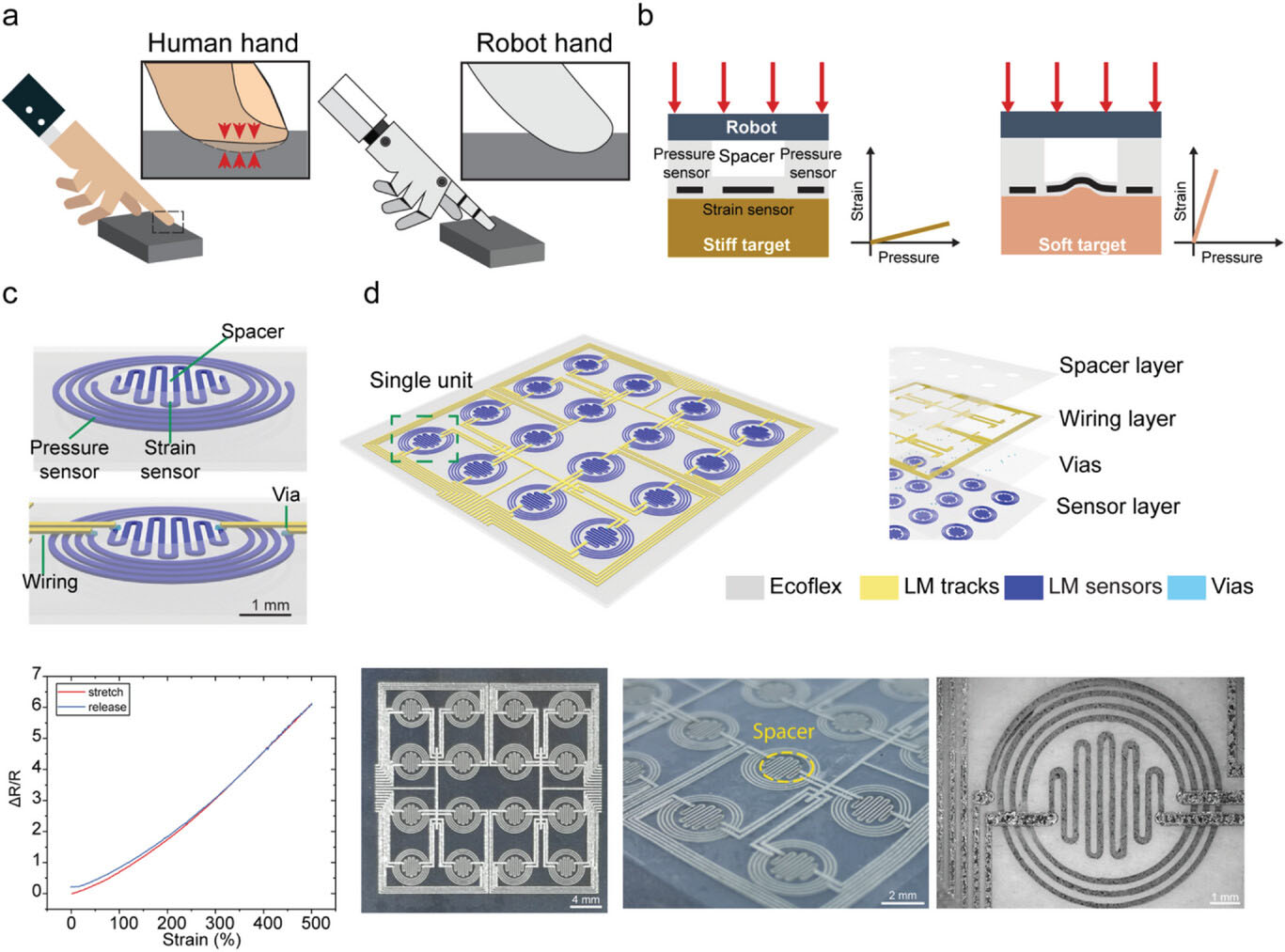 |
| Compliance bimodal sensor system. a) Schematics illustrating the deformation of human and robotic skin upon touch. b) Cross-sections of the proposed compliant sensor system when in contact with a stiff and soft object target. c) Layout of the pressure and strain sensor unit and interconnects. d) Sensor matrix (4 × 4 units) with corresponding layers. e) Relative electrical change as a function of strain of Ecoflex encapsulated EGaIn conductor (width = 0.2 mm, length = 20 mm, R0 = 12.42, 6 samples). f–h) Optical photographs of the e) sensor matrix, f) wiring, and g) vias. (Reprinted with permission by Wiley-VCH Verlag) |
| "We aimed to mimic the human perception of softness by combining multimodal soft strain and pressure sensors," explains Stephanie Lacour, head of the EPFL Laboratory for Soft Bioelectronic Interfaces and leader of the study. "The key innovation was addressing the interaction between a soft sensor and a touched object, which influences the sensor response." |
| The skin consists of a thin elastomer membrane embedded with resistive pressure and strain sensors made from liquid metal microtracks. These tiny liquid metal veins remain fluid, allowing for large deformations without restricting the sensor. The layout combines a pressure sensor in a spiral pattern with a strain sensor tracing a meandering path along the interior. This compact design is enabled by spray-coating the liquid metal onto both sides of the membrane and using it to create vertical vias between layers. |
| Through finite element modeling – a computer simulation method for analyzing designs - the researchers determined that object softness relative to the sensor influences its deformation and alters sensor outputs. They derived an analytical model to calibrate the pressure sensor based on strain sensor data, allowing accurate computation of compliance regardless of the target object's properties. |
| The skin successfully distinguished the compliance of materials like rubber, silicone, and hydrogel, as well as chicken heart and breast tissues. The team implemented a 4x4 sensor array to map consistency over a surface. This registered objects' position, contact area, and localized soft/firm regions. The technology could aid delicate sensing tasks in medical robotics and advanced prosthetics. |
| "Traditional rigid robots undergo minimal deformation, so detecting surface changes is limited," explains Lacour. "Our skin deforms markedly like human skin, enabling high-resolution haptic perception through the synergistic multimodal sensors." |
| The study emphasizes the importance of sensor-object interactions in soft robotics and electronics, where the touched material can substantially influence response. While applied to relatively simple shapes, the basic methodology could be expanded to more complex surfaces. |
| Equipping robots and prosthetics with human-like haptic perception could enable smarter, more dexterous manipulation and interactions. This artificial skin mimics human softness perception and so promises to aid delicate medical procedures like palpation, improve precision in prosthetic devices, and enhance human-machine collaboration. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
