| Posted: Sep 24, 2018 |
Robotic electronic skin made from spray-coated tactile sensor(Nanowerk News) Robots will be able to conduct a wide variety of tasks as well as humans if they can be given tactile sensing capabilities. |
| A KAIST research team has reported a stretchable pressure insensitive strain sensor by using an all solution-based process (ACS Nano, "Pressure Insensitive Strain Sensor with Facile Solution-based Process for Tactile Sensing Applications"). |
| The solution-based process is easily scalable to accommodate for large areas and can be coated as a thin-film on 3-dimensional irregularly shaped objects via spray coating. |
| These conditions make their processing technique unique and highly suitable for robotic electronic skin or wearable electronic applications. |
| Spray Coated Tactile Sensor on a 3-D Surface for Robotic Skin. (Video: KAIST) |
| The making of electronic skin to mimic the tactile sensing properties of human skin is an active area of research for various applications such as wearable electronics, robotics, and prosthetics. One of the major challenges in electronic skin research is differentiating various external stimuli, particularly between strain and pressure. Another issue is uniformly depositing electrical skin on 3-dimensional irregularly shaped objects. |
| To overcome these issues, the research team led by Professor Steve Park from the Department of Materials Science and Engineering and Professor Jung Kim from the Department of Mechanical Engineering developed electronic skin that can be uniformly coated on 3-dimensional surfaces and distinguish mechanical stimuli. |
| The new electronic skin can also distinguish mechanical stimuli analogous to human skin. The structure of the electronic skin was designed to respond differently under applied pressure and strain. Under applied strain, conducting pathways undergo significant conformational changes, considerably changing the resistance. |
| On the other hand, under applied pressure, negligible conformational change in the conducting pathway occurs; e-skin is therefore non-responsive to pressure. The research team is currently working on strain insensitive pressure sensors to use with the developed strain sensors. |
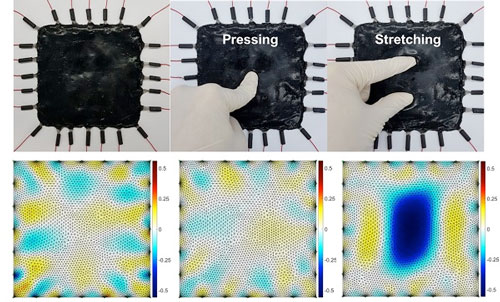 |
| Detecting mechanical stimuli using electrical impedance tomography. (Image: KAIST) |
| The research team also spatially mapped the local strain without the use of patterned electrode arrays utilizing electrical impedance tomography (EIT). By using EIT, it is possible to minimize the number of electrodes, increase durability, and enable facile fabrication onto 3-dimensional surfaces. |
| Professor Park said, “Our electronic skin can be mass produced at a low cost and can easily be coated onto complex 3-dimensional surfaces. It is a key technology that can bring us closer to the commercialization of electronic skin for various applications in the near future.” |
| Source: Korea Advanced Institute of Technology |
|
Subscribe to a free copy of one of our daily Nanowerk Newsletter Email Digests with a compilation of all of the day's news. |

