New technique helps robots pack objects into a tight space
(Nanowerk News) Anyone who has ever tried to pack a family-sized amount of luggage into a sedan-sized trunk knows this is a hard problem. Robots struggle with dense packing tasks, too.
Key Takeaways
MIT researchers utilize a diffusion model, a type of generative AI, to efficiently tackle the robot packing problem, considering multiple constraints simultaneously.
The new method, Diffusion-CCSP, employs a set of machine-learning models, each representing a specific constraint. These models collaboratively generate solutions that satisfy all constraints.
This technique surpasses traditional methods in terms of speed and the number of successful solutions within a given time, even for problems not seen during training.
Diffusion-CCSP's design reduces the amount of required training data and can adapt to various complex robot tasks, like organizing bookshelves or warehouse order fulfillment.
Experts anticipate that this advancement will pave the way for more capable and dependable autonomous systems across diverse applications.
The Research
For the robot, solving the packing problem involves satisfying many constraints, such as stacking luggage so suitcases don’t topple out of the trunk, heavy objects aren’t placed on top of lighter ones, and collisions between the robotic arm and the car’s bumper are avoided.
Some traditional methods tackle this problem sequentially, guessing a partial solution that meets one constraint at a time and then checking to see if any other constraints were violated. With a long sequence of actions to take, and a pile of luggage to pack, this process can be impractically time consuming.
MIT researchers used a form of generative AI, called a diffusion model, to solve this problem more efficiently. Their method uses a collection of machine-learning models, each of which is trained to represent one specific type of constraint. These models are combined to generate global solutions to the packing problem, taking into account all constraints at once.
Their method was able to generate effective solutions faster than other techniques, and it produced a greater number of successful solutions in the same amount of time. Importantly, their technique was also able to solve problems with novel combinations of constraints and larger numbers of objects, that the models did not see during training.
Due to this generalizability, their technique can be used to teach robots how to understand and meet the overall constraints of packing problems, such as the importance of avoiding collisions or a desire for one object to be next to another object. Robots trained in this way could be applied to a wide array of complex tasks in diverse environments, from order fulfillment in a warehouse to organizing a bookshelf in someone’s home.
“My vision is to push robots to do more complicated tasks that have many geometric constraints and more continuous decisions that need to be made — these are the kinds of problems service robots face in our unstructured and diverse human environments. With the powerful tool of compositional diffusion models, we can now solve these more complex problems and get great generalization results,” says Zhutian Yang, an electrical engineering and computer science graduate student and lead author of a paper on this new machine-learning technique ("Compositional Diffusion-Based Continuous Constraint Solvers").
Her co-authors include MIT graduate students Jiayuan Mao and Yilun Du; Jiajun Wu, an assistant professor of computer science at Stanford University; Joshua B. Tenenbaum, a professor in MIT’s Department of Brain and Cognitive Sciences and a member of the Computer Science and Artificial Intelligence Laboratory (CSAIL); Tomás Lozano-Pérez, an MIT professor of computer science and engineering and a member of CSAIL; and senior author Leslie Kaelbling, the Panasonic Professor of Computer Science and Engineering at MIT and a member of CSAIL. The research will be presented at the Conference on Robot Learning.
This figure shows examples of 2D triangle packing. These are collision-free configurations. (Image: Courtesy of the researchers)
Constraint complications
Continuous constraint satisfaction problems are particularly challenging for robots. These problems appear in multistep robot manipulation tasks, like packing items into a box or setting a dinner table. They often involve achieving a number of constraints, including geometric constraints, such as avoiding collisions between the robot arm and the environment; physical constraints, such as stacking objects so they are stable; and qualitative constraints, such as placing a spoon to the right of a knife.
There may be many constraints, and they vary across problems and environments depending on the geometry of objects and human-specified requirements.
To solve these problems efficiently, the MIT researchers developed a machine-learning technique called Diffusion-CCSP. Diffusion models learn to generate new data samples that resemble samples in a training dataset by iteratively refining their output.
To do this, diffusion models learn a procedure for making small improvements to a potential solution. Then, to solve a problem, they start with a random, very bad solution and then gradually improve it.
For example, imagine randomly placing plates and utensils on a simulated table, allowing them to physically overlap. The collision-free constraints between objects will result in them nudging each other away, while qualitative constraints will drag the plate to the center, align the salad fork and dinner fork, etc.
Diffusion models are well-suited for this kind of continuous constraint-satisfaction problem because the influences from multiple models on the pose of one object can be composed to encourage the satisfaction of all constraints, Yang explains. By starting from a random initial guess each time, the models can obtain a diverse set of good solutions.
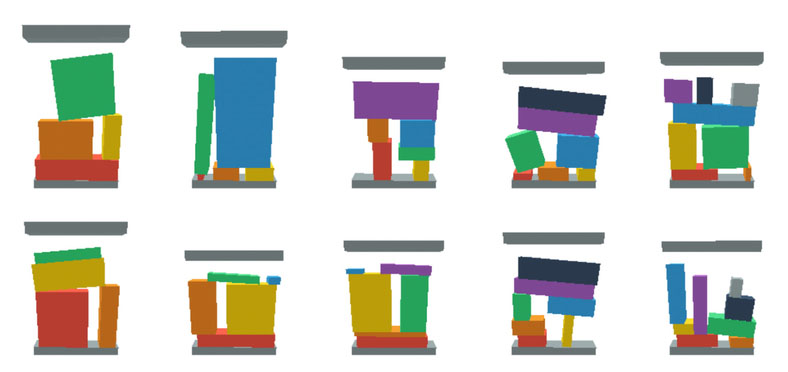
This figure shows 3D object stacking with stability constraints. Researchers say at least one object is supported by multiple objects. (Image: Courtesy of the researchers)
Working together
For Diffusion-CCSP, the researchers wanted to capture the interconnectedness of the constraints. In packing for instance, one constraint might require a certain object to be next to another object, while a second constraint might specify where one of those objects must be located.
Diffusion-CCSP learns a family of diffusion models, with one for each type of constraint. The models are trained together, so they share some knowledge, like the geometry of the objects to be packed.
The models then work together to find solutions, in this case locations for the objects to be placed, that jointly satisfy the constraints.
“We don’t always get to a solution at the first guess. But when you keep refining the solution and some violation happens, it should lead you to a better solution. You get guidance from getting something wrong,” she says.
Training individual models for each constraint type and then combining them to make predictions greatly reduces the amount of training data required, compared to other approaches.
However, training these models still requires a large amount of data that demonstrate solved problems. Humans would need to solve each problem with traditional slow methods, making the cost to generate such data prohibitive, Yang says.
Instead, the researchers reversed the process by coming up with solutions first. They used fast algorithms to generate segmented boxes and fit a diverse set of 3D objects into each segment, ensuring tight packing, stable poses, and collision-free solutions.
“With this process, data generation is almost instantaneous in simulation. We can generate tens of thousands of environments where we know the problems are solvable,” she says.
Using generative AI models, MIT researchers created a technique that could enable robots to efficiently solve continuous constraint satisfaction problems, such as packing objects into a box while avoiding collisions, as shown in this simulation. (Image: Courtesy of the researchers)
Trained using these data, the diffusion models work together to determine locations objects should be placed by the robotic gripper that achieve the packing task while meeting all of the constraints.
They conducted feasibility studies, and then demonstrated Diffusion-CCSP with a real robot solving a number of difficult problems, including fitting 2D triangles into a box, packing 2D shapes with spatial relationship constraints, stacking 3D objects with stability constraints, and packing 3D objects with a robotic arm.
Their method outperformed other techniques in many experiments, generating a greater number of effective solutions that were both stable and collision-free.
In the future, Yang and her collaborators want to test Diffusion-CCSP in more complicated situations, such as with robots that can move around a room. They also want to enable Diffusion-CCSP to tackle problems in different domains without the need to be retrained on new data.
“Diffusion-CCSP is a machine-learning solution that builds on existing powerful generative models,” says Danfei Xu, an assistant professor in the School of Interactive Computing at the Georgia Institute of Technology and a Research Scientist at NVIDIA AI, who was not involved with this work. “It can quickly generate solutions that simultaneously satisfy multiple constraints by composing known individual constraint models. Although it’s still in the early phases of development, the ongoing advancements in this approach hold the promise of enabling more efficient, safe, and reliable autonomous systems in various applications.”
Source: By Adam Zewe, MIT (Note: Content may be edited for style and length)