| Mar 01, 2023 |
Designing 4D-printed hygromorphs |
| (Nanowerk Spotlight) Hygromorphs are materials that can change their shape or size in response to changes in humidity or moisture. They are also sometimes referred to as humidity-responsive materials or moisture-responsive materials. |
| Hygromorphs can be found in nature, such as in the way that some plant structures change shape in response to changes in humidity, or in the way that the wings of some insects can fold up to protect themselves from moisture. |
| Researchers have also developed synthetic hygromorphs that can be used in various applications, such as in sensors and actuators. These 'smart' materials can be designed to have specific responses to changes in humidity, allowing them to be used for tasks such as sensing moisture levels in the environment or responding to changes in humidity by changing shape or size. For instance, engineering applications such as smart solar concentrators and trackers, humidity self-regulating buildings and highly personalized clothing are among those in which hygromorph materials could be useful. |
| 4D printing technology involves adding a fourth dimension of time to 3D printing. The basic idea is to manipulate materials at nano and micro levels in order to produce materials that can modify their structures over time at the macro level. The term 4D printing was first introduced in 2013 by architect and computer scientist Skylar Tibbits at a TED talk. |
| 4D printing has enabled the development of innovative adaptive structures by combining smart materials, multiple external stimuli, and additive manufacturing. This technology allows for the creation of new shapes and capabilities by altering properties of the materials. In a previous Nanowerk Spotlight we reviewed the material systems used in 4D printing by emphasizing mechanisms and potential applications. |
| Among the multiple stimuli available to actuate 4D-printed structures – heat, pH, electricity, magnetic field – only a limited amount of studies have been conducted on humidity-based actuation. |
| While there have been efforts to create hygromorph prototypes, there is currently no comprehensive design process for producing humidity-actuated, 4D-printed composite materials. A recent review in Advanced Functional Materials ("The Design of 4D-Printed Hygromorphs: State-of-the-Art and Future Challenges") describes the materials and additive manufacturing techniques used for hygromorph composite fabrication and discusses the relevant parameters that control actuation, the models selection and performance, the design methods and the actuation measurements for customized 4D-printed hygromorph materials. On top of this, it provides a practical design process to describe step by step the creation of hygromorphs. |
| Currently, the two main fields of applications for hygromorphs are biomedical and adaptive structures engineering. |
| In biomedical applications, hygromorphs can be used to create responsive drug delivery systems, biosensors, and tissue engineering scaffolds. For example, a hygromorphic scaffold can be designed to expand or contract in response to changes in humidity, providing mechanical cues to guide cell growth and tissue regeneration. Some researchers have created hydrogel-based organs and capsules that can release drugs based on specific stimuli. Additionally, 4D printing can be used for bone repair. Adding living cells to hygromorphs can make the structures even more versatile. |
| In adaptive structures engineering, hygromorphs can be used to create cladding elements for self-regulating building facades, responsive textiles, and morphing aircraft wings. For instance, a hygromorphic textile can be designed to shrink or stretch in response to changes in humidity, providing a comfortable microclimate for the wearer. |
| Even though humidity is the main trigger actuation, temperature also has an impact on the actuation in most applications. In fact, in many of the applications using humidity-triggered actuators, it is impossible to fully de-correlate humidity and temperature, as they influence each other. |
| Therefore, the idea behind this review is to focus only on moisture to show the potential to qualify and quantify the impact of these trigger mechanisms on the actuation of different 4D-printed structures. By studying moisture separately, it will be easier to understand its impact on 4D-printed applications when combined with temperature or other sources of actuation. |
| There are six different actuation functions for 4D-printed structures: bending, folding, twisting, expansion/contraction, and property change (i.e., color or state). However, only bending and twisting are considered as the most common actuation functions found in structural hygromorphs. |
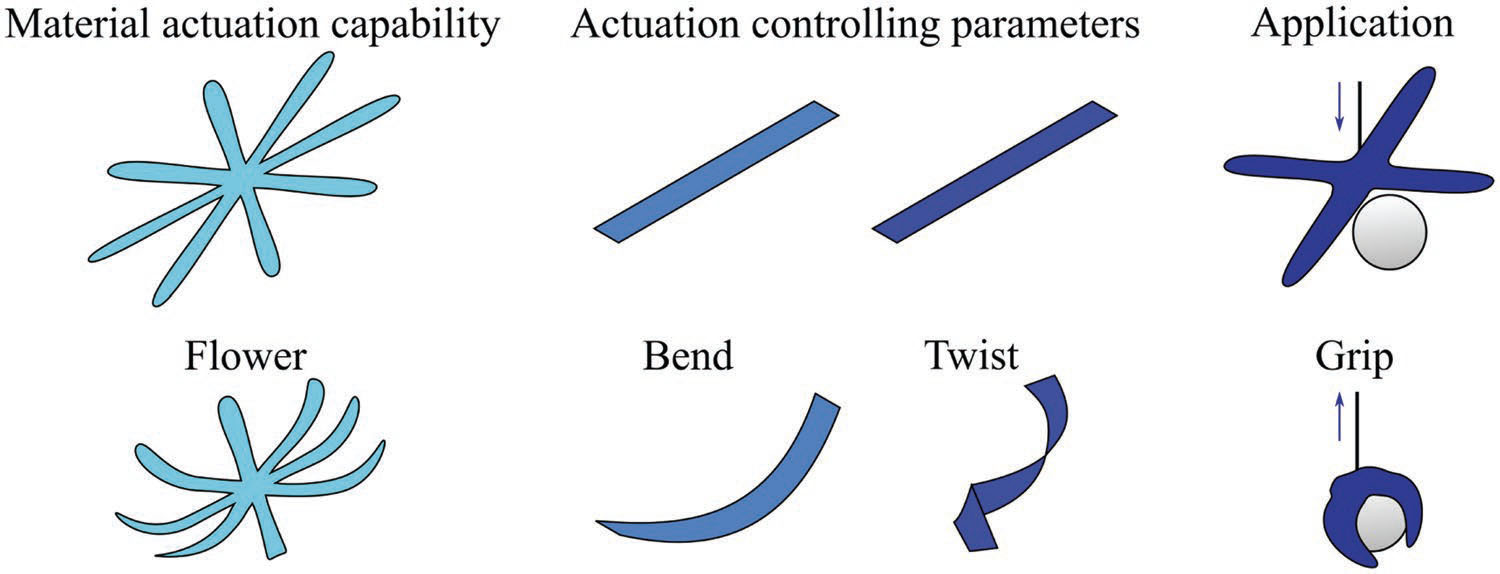 |
| Actuation of 4D-printed hygromorphs. Material actuation capability: Demonstrates the capability of a material system to provide actuation by printing aesthetic hygromorph, i.e., bio mimicking flower, leaf, origami, kirigami. Actuation controlling parameters: Assesses the possibility to control actuation by tailoring printing, geometric, dimensional parameters. Application: Tests the functionality of the hygromorph for potential in-service application, i.e., gripper, aperture, and load lifting device. (Reprinted with permission by Wiley-VCH Verlag) |
| As the authors point out, the selection of material for 4D printing depends significantly on the design objectives assigned to the printed structure. For instance, polymer (high bending moment and stiff) would be used for engineering, elastomer (large actuation and resilient) for soft robotics, and hydrogels (biocompatibility and large actuation) for biomedical applications. |
| Mixing the different material types, for instance by printing hydrogel on top of 3D-printed elastomer layers, increases the size of the actuation design space. |
| It should be pointed out that in terms of design objectives for the 4D printed hygromorphs, actuation is just the minimum. Other objective functions such as stiffness, strength, or weight can be added to the actuator. |
| With regard to the used hardware, i.e., 3D printers, polymers are mostly printed via Fused Filament Fabrication, whereas hydrogels are largely printed via pneumatic assisted direct ink writing. The production of bi-material structures necessitates the use of a machine with two printing heads, or one rig in which the same printing head can switch between different materials. |
| Another very important aspect of the fabrication process is actuation control, i.e., making sure that the finished material or device obtains the required actuation. The the most important properties to control actuation are stiffness and hygro-expansion as well as the quality of the used material. |
| When characterizing the measurement of the expansion when the 4D printed material is subjected to humidity conditioning, the terms swelling index, swelling ratio or Coefficient of Moisture Expansion (CME) all describe the ability of a material to expand when immersed in varying moisture systems. |
| In their review, the authors generalize a full design process for a 4D printed hygromorph which includes designing concepts, using additive manufacturing to produce designs, and measuring actuation. Other phases of the process that are discussed include selecting materials and parameters to control, modeling, and optimization. |
| One of the main challenges in implementing moisture-triggered 4D-printed structures is to account for all the reversibility tests needed to understand the actuation capability of the structure. To that end it is necessary to model the evolution of the actuation to achieve long-term control. One possible solution to this issue is to automatically record the deformation and moisture variation within the actuators and then simulate long-term actuation efficiently. |
| This review presents a classification system for different types of materials and their distributions, including short fiber composites, long fiber composites, and multi-materials. The purpose of this classification is to guide readers in developing actuated hygromorph structures. Although continuous fiber composites offer better mechanical performance, they are more challenging to print compared to short fibers and multi-materials. |
| To create effective actuation, it is essential to combine triggers and architecture of the actuators. Multifunctional structures present significant opportunities for materials selection in 4D printing technologies. The understanding of actuation triggers is crucial for proposing new materials for hygromorphs design. |
| The authors classify the modeling of actuators into different scales – layer, phase, and intra-phase – to understand how to measure relevant mechanical and physical properties for actuation. Fiber-based actuators require more investigation to understand the influence of phase scale material properties on 4D printed actuation. Developing robust modeling approaches to describe what occurs at intra-phase scale for both multi-materials and fiber-based actuators is central to understanding and predicting the influence of printing parameters on hygromorphs actuation. |
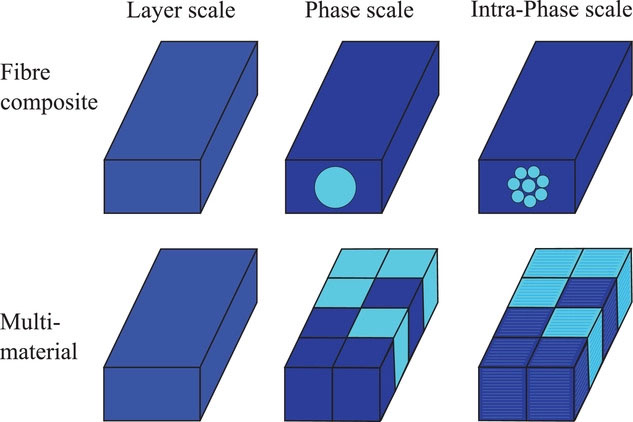 |
| The different scales of modeling for the material distribution. (Reprinted with permission by Wiley-VCH Verlag) |
| Printing parameters such as the printing temperature, speed, and path are key to control the actuation of the structure. However, key challenge for the development of 4D printing hygromorphs will be to test all those parameters for humidity-triggered actuators. |
| Moreover, researchers in the field of moisture actuation for 4D-printed structures must establish a standard process to measure actuation amplitude and control capability for a given structure. This standard would help reduce confusion arising from varying actuation measuring parameters (such as position and curvature) and conditioning processes currently employed by different research groups. Without such a standard, it becomes challenging to compare materials and actuated structures described in the literature. |
| The review goes on to define tree types of conditioning phases: pre-printing, as-printing, and post-printing conditioning. Each of them has its influence on the material properties responsible for the actuation. The first two conditioning phases tend to impact the quality of the hygromorph printed, whereas the post-printing conditioning can accelerate the deterioration of the material properties of the actuator over time. |
| The authors then discuss various strategies available for modeling the actuation of 4D-printed hygromorphs, including Timoshenko bi-layer beam-inspired models, classical laminate theory, finite element analysis, elastic energy, and voxel-based models, among others. They critically examine each modeling technique and associate it with specific configurations of actuators. |
| However, one major challenge facing modeling techniques for moisture-triggered actuators is accounting for the water diffusion through the material. The gradient of water inside the material after the actuation affects the temporary deformation state of the structure, and all the modeling methods would benefit from accounting for this water gradient evolution through the material itself. |
| Techniques for measuring deformations can be categorized into three groups: physical, photo, or point of interest tracking. These measurement techniques, along with their advantages and disadvantages, can be associated with the parameters responsible for the actuation of hygromorphs. |
| The authors also discuss techniques for measuring actuation speed and notes that limited work has been done to improve actuation speed. Dynamic actuation will require custom modeling and tests to analyze the influence of printing parameters and material properties. Standardization of tests should be established to compare the dynamic behavior of materials and structures actuated within different research groups worldwide. Conducting such tests would require measuring water conductivity of printed materials to generate ad-hoc models. |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
