| Posted: August 14, 2009 |
Sticky fingers? Tiny robots to grip nanotubes |
|
(Nanowerk News) How do you handle the tiny components needed for constructing nanoscale devices? A European consortium has built two demonstrators that include microrobots equipped with microgrippers to automatically pick up and install carbon nanotubes thousands of times thinner than a human hair. They have even tackled that ever-present bane of nanotechnology – sticky fingers.
|
|
Carbon nanotubes, rolled up sheets of carbon only a few tens of nanometres in diameter, could become an essential part of the nanotechnologist’s construction kit. But there is a problem: how can you handle objects which are so thin that they cannot be seen at all with a normal optical microscope?
|
|
“The handling and characterisation of these objects has become more and more important in materials science and nanotechnology,” says Volkmar Eichhorn of the University of Oldenburg and its associated institute, OFFIS. “They have a huge application potential in various products.”
|
|
One solution, developed by the EU-funded NanoHand project, is to use mobile microrobots equipped with delicate handling tools. NanoHand builds on the work of ROBOSEM, an earlier EU project that developed the basic technologies that are now being put into effect.
|
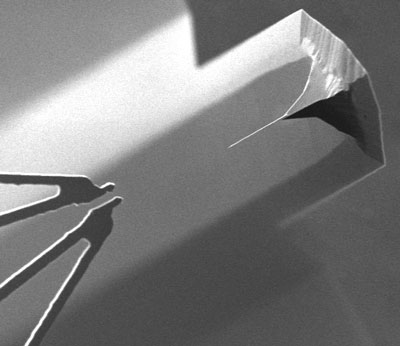 |
| The microgrippers magnified. (Image: NanoHand)
|
|
The robots, about two centimetres in size, work inside a scanning electron microscope where their activities can be followed by an observer. “The whole set-up is integrated into the vacuum chamber of the microscope,” Eichhorn explains. “There is a glass plate where these mobile microrobots can walk around.”
|
|
Microgrippers
|
|
Each robot has a ‘microgripper’ that can make precise and delicate movements. It works on an electrothermal principle to open and close the jaws, much like a pair of tweezers.
|
|
The jaws open to about 2 micrometres and can pick up objects less than 100 nanometres in size. “[It is] really able to grip micro or even nano objects,” Eichhorn says. “We have handled objects down to tens of nanometres.”
|
|
At that scale, the intermolecular forces between objects are stronger than gravity. Once a nanotube has been picked up it will stick to the jaws of the gripper and cannot easily be dropped into position. The team have had to develop novel ‘pick-and-place’ techniques to get around this problem.
|
|
One approach is to glue the tube in its final position using electron beam-induced deposition. Another is to use geometrical principles to ensure that the intermolecular forces pulling the tube towards its intended location are greater than those holding it in the jaws of the gripper.
|
|
|
|
“Worldwide, we are the first project that has really realised the automated microgripper-based pick-and-place experiments,” Eichhorn notes. “The new thing is the high accuracy and the small scale of the objects – in the range of tens or hundreds of nanometres – and the excellent control and software architecture being built around this whole set-up facilitating a high degree of automation.”
|
|
Better microscope
|
|
An early success of the project was to improve the performance of an atomic force microscope, a workhorse of nanotechnology.
The microscope ‘feels’ a surface by dragging a fine probe over it. Individual atoms can be sensed and a picture built up. But conventional probes have a pyramid-shaped tip which cannot follow the hills and valleys of deeply corrugated surfaces. The NanoHand team used their microrobots to automatically pick up a carbon nanotube and attach it to the tip, so greatly improving the probe’s ability to sense deep valleys.
|
|
This achievement was made with the ‘NanoLab’ demonstrator, designed for use in experimental laboratory situations.
|
|
In parallel, the industrial partners have developed a more robust ‘NanoFab’ demonstrator, better suited to the needs of industry. They are exploring how the technology could be used for rapid prototyping of new designs for microchips. One idea is to use carbon nanotubes as ‘interconnects’, the fine wires that make the electrical connections to a chip. Because of their high electrical conductivity, carbon nanotubes dissipate less heat than copper and allow circuits to be packed more densely.
|
|
This application is of particular interest to STMicroelectronics, one of the project partners and a heavyweight maker of microchips. “They would like to have a nanorobotic system where they can do fast and rapid characterisation of these devices,” says Eichhorn. “Up to now, it was a manual, teleoperated characterisation which was very time consuming.”
|
|
|
|
Early exploitation
|
|
Many other industrial applications are possible, including novel devices that could not be constructed any other way. Applications in composite materials, displays and new kinds of transistors are all being talked about.
|
|
Other groups are working on methods of handling nanotubes, especially in the USA, Japan and China, but the NanoHand system of microrobots and microgrippers is proving effective and reliable. “It’s very promising for nanotechnology applications,” says Eichhorn.
|
|
From the start, the project has been run with commercialisation in mind and the first product is already on the market. Two of the industrial partners, Tescan and Klocke Nanotechnik, are collaborating to sell a scanning electron microscope equipped with a nanopositioning system based on NanoHand technology.
|
|
The Technical University of Denmark (DTU Nanotech) intends to set up a spin-off to market the microgrippers and the Ecoles Polytechniques Fédérale de Lausanne (EPFL) is seeking to further develop the microrobots to the point where they can be commercialised.
|
|
NanoHand received funding from the ICT strand of the EU’s Sixth Framework Programme for research.
|

