Cyborg cockroaches guided by ultraviolet light and motion feedback navigate obstacles autonomously, showing how noninvasive control can coordinate biological movement with electronic sensing.
Magnetically guided microrobots coated with bacteriophages penetrate and dismantle bacterial biofilms, achieving targeted removal of microbial contamination through coordinated mechanical disruption and species-specific viral infection.
A magnetic microrobot navigates lung airways, drills microlesions, gathers biomarkers, and rapidly classifies cancer tissue with Raman sensing and machine learning in a single integrated workflow.
Autonomous microswimmers use optical signals to measure temperature as they move, enabling precise thermal mapping in fluid environments without external guidance or contact.
A new roadmap outlines how advances in propulsion, control, and design are positioning micro and nanorobots for use in medicine, environmental cleanup, and sensing technologies.
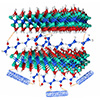
A multilayer MXene-based film bends rapidly and reversibly under humidity, light, and solvent exposure, offering stable multi-stimulus actuation for soft robotics applications.
A levitating magnetic microrobot autonomously sorts sub-millimeter particles by weight in 3D environments, enabling precise, contamination-free handling in biomedical and manufacturing applications.
Small-scale robots with chemical propulsion and shape-morphing abilities mimic aquatic insects, enabling autonomous navigation for medical, environmental, and industrial use.
 Subscribe to our Nanotechnology Spotlight feed
Subscribe to our Nanotechnology Spotlight feed