| Posted: Nov 22, 2015 |
Tiny robots inspired by pine cones and powered by humidity (w/video)
(Nanowerk News) Most efforts to develop bio-inspired robots center on mimicking the motions of animals: but plants move too -- even if most of their motions are so slow they can't be detected by the naked eye.
|
|
The mechanism involved in plant movement is much simpler than that of animals using muscles. To generate motion, plants and some seeds -- such as mimosa leaves, Venus flytraps and pine cones -- simply harness the supply or deprival of water from plant tissues.
|
 |
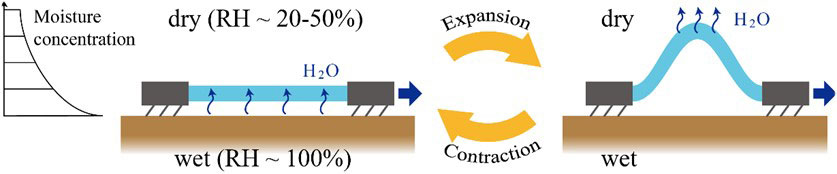
| This schematic shows the concept behind the team's plant-inspired microrobot. (click on image to enlarge)
|
|
The future of bio-inspired engineering or robotics will greatly benefit from lessons learned from plants, according to a group of Seoul National University researchers. During the American Physical Society's 68th Annual Meeting of the Division of Fluid Dynamics, Nov. 22-24, 2015, in Boston, they will share details about how studying plants enabled them to create tiny robots powered exclusively by changes in humidity.
|
|
The pure simplicity of the manner by which pine cones and seeds respond to changes in environmental humidity with motion is at the heart of the group's work.
|
|
"Some seeds consist of a head that contains all its genetic information, along with a long appendage called an 'awn' that is responsible for locomotion -- just like an animal's sperm," explained Ho-Young Kim, a professor in the Department of Mechanical and Aerospace Engineering at Seoul National University. "Awns are composed of two tissue layers: one that swells with humidity (active), and another that's insensitive to humidity change (inactive)."
|
|
If environmental humidity increases, the bilayer bends from changes in length-wise swelling. Periodic humidity changes cause the bilayer to bend and unbend repeatedly -- meaning that changes in environmental humidity can be converted to mechanical work.
|
|
"We mimicked the bilayer structure to make an actuator that can generate motions by using environmental humidity change," Kim said. "Plants move slowly -- one cycle of bending and unbending can take an entire day. To increase the response speed of the bilayer, we had to develop a novel way to fabricate the active layer. Its response speed increases with the surface-area-to-volume ratio of the layer because humidity can be absorbed more rapidly, so we deposited active nanoscale fibers onto an inactive layer."
|
|
While a key step in creating a robot, repeated bending and unbending produces no net locomotion. "This cyclic motion must be converted into directional motion to create a robot that moves," he said. "So we attached legs to our actuator, which allows only one-directional locomotion. We call the legs 'ratchets' and combined them with an actuator to build our bio-inspired robot."
|
|
|
|
The Seoul National University group's tiny plant-inspired robot moves via changes in humidity, shown here with a millimeter-scale ruler in the background.
|
|
The group's work is significant because it opens the door for tiny robots capable of locomotion based solely upon changes in environmental humidity -- no electrical power supplies are involved. Just imagine: robots functioning in the field where no electricity is available because they operate based on changes in humidity levels in the same manner as seeds.
|
|
Sounds too easy, right? "Making a bilayer for the robots isn't difficult, but making a fast one requires technical expertise," said Kim. The group has also developed a mathematical model to find the optimum design for the robot to achieve the fastest speed for any given robot size.
|
|
One of the reasons why the group envisions a bright future for humidity-change-powered microrobots is because humidity changes are all around us.
|
|
"Generally, it tends to be drier during the day and more humid at night -- the periodic humidity change cycle that enables seeds to bury themselves in the ground," said Kim. "Humidity changes occur even when we breathe, because humid air is exhaled."
|
|
Importantly for the group's future plans, human skin is more humid than the atmosphere. "This is the main humidity gradient that we want to tap into," he pointed out. The team is exploring the possibility of placing a tiny robot directly on human skin -- one that bends because it's humid near skin.
|
|
"The concept is that by bending, some part of the robot will move away from the skin to encounter dry atmospheric air. When it dries, the robot will return to an upright position near the skin," he said. Then the cycle begins again, and the robot continues to move based on changes in the skin's humidity.
|
|
Moving forward, the group's goal is to develop these futuristic-sounding medical robots capable of functioning on human skin. Thanks to bio-inspiration from plants, "such a robot could do jobs like disinfecting wounds, removing skin wrinkles, and nourishing skin tissues," Kim added.
|
|
Presentation #A25.9, "Moisture-driven actuators inspired by motility of plants", is authored by Beomjune Shin, Minhee Lee and Ho-Young Kim. It will be at 9:44 a.m. on Sunday, Nov. 22, 2015 in Room 304 of the Hynes Convention Center in Boston.
|