| Posted: Oct 24, 2013 |
Microfabrication inspired by Lego |
| (Nanowerk Spotlight) Most tools used for the pick-and-place of microobjects are either single-ended microprobes or double-ended microgrippers. In a previous Nanowerk Spotlight ("Nanotechnology gets a grip"), for instance, we reported on a design for electrothermal microgrippers that can be integrated into a nanorobotic system and can be used for serial device assembly. |
| For microprobes, both the pick-up and placement are challenging due to the adherent forces. For microgrippers, the pick-up is easier and secure due to the gripping motion, but the placement is still difficult. When a microgripper opens its gripping fingers, the microobject still adheres to one of the fingers by strong adhesion forces. |
| Owing to force scaling laws, the adhesion forces at the microscale – i.e., capillary forces, van der Waals forces, and electrostatic forces – dominate gravity. These adhesion forces make both pick-up step and placement step of a microobject challenging. Specifically, during the pick-up, the adhesion forces between the microobject and the substrate must be overcome. During the placement, the adhesion forces between the microobject and the manipulation tool must be overcome. |
| These challenges are inherent to the tools, motivating the development of more versatile tools that modulate the adhesion forces drastically. A number of techniques and tools have been proposed to facilitate the pick-and-place process, such as using a microgripper for secure grasping and vibrating the tool to release the adhered microobject. Nevertheless, few of them can achieve deterministic assembly of planar LEGO block or brick-like structures without relying on mating interfaces and adhesives. |
| In a paper last year in the Journal of Micromechanics and Microengineering ("Silicon micro-masonry using elastomeric stamps for three-dimensional microfabrication"), a team of researchers from the University of Illinois at Urbana-Champaign have demonstrated a manufacturing route to three dimensional silicon microsystems – which they termed ‘micro-masonry’ – based on individual manipulation. |
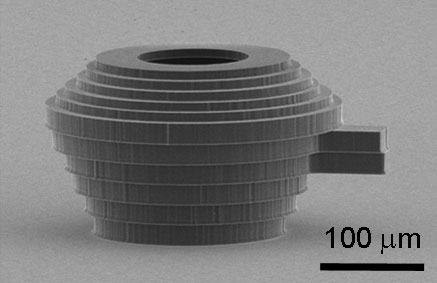 |
| SEM images of stacked silicon rings with varied thickness (10 and 50 µm) and diameter (from 200 µm to 300 µm). (© IOP Publishing) |
| "Our approach is inspired by LEGO work and its procedure can be compared to masonry in a construction site," Seok Kim, an Assistant Professor in the Department of Mechanical Science & Engineering, explains to Nanowerk. "The microobjects made of silicon, silicon dioxide, or gold are fabricated in a donor substrate as bricks are manufactured in a brickyard. A specially designed soft polymeric stamp transfers microobjects from the donor substrate to target areas on a receiver substrate as a mason carries and places bricks. Finally, placed microobjects are permanently bonded with rapid thermal annealing as bricks are bound with mortar." |
| The team's approach makes use of the adhesion forces between a polymeric stamp and a microobject for the pick-up. After the pick-up, the adhesion forces between those drastically decrease to enable the placement of the microobject on a target location. |
| "This adhesion force modulation allows us to realize LEGO-like microassembly," says Kim. |
| This work presents a new paradigm for the pick-and-place assembly process. A microtipped polymeric stamp is specially designed to modulate the adhesion forces between the stamp and the microobject. In this way, the microobject can be picked up with ease and placed on a target location deterministically. |
| Hoyun Keum, the paper's first author, points out that this manufacturing strategy provides many attractive features such as cost-effectiveness through fabrication of highly dense individual units on a single donor substrate that can be assembled on multiple foreign substrates in a sparse manner. Its manufacturing throughput can be increased when combined with automation. Moreover, it is highly fault tolerant since one unit assembly failure does not affect other neighboring units assembly. |
| Making use of this micro-masonry technique and advancing it further, Kim and his team have now demonstrated the assembly of MEMS mechanical sensors and actuators. In a recent issue of the Journal of Microelectromechanical Systems ("Micro-Masonry of MEMS Sensors and Actuators"), they report the microfabrication processes for retrievable complex MEMS components and the microassembly processes for integrating those components into MEMS sensors and actuators. Furthermore, they demonstrate the integration of gold films onto the assembled silicon device via micro-masonry to form metal contacts and to facilitate a subsequent wire bonding process. |
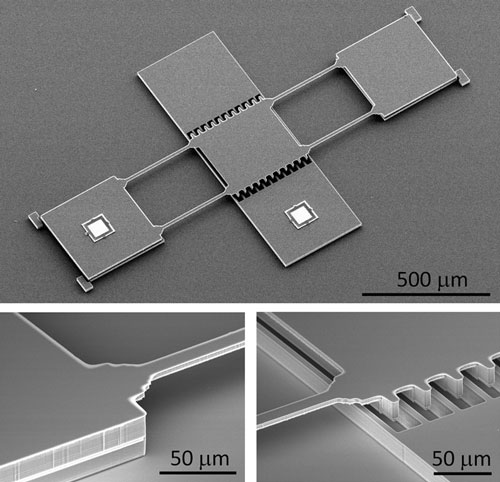 |
| SEM images of an assembled MEMS comb-drive device that is composed of a top comb, a bottom comb, two spacers, and two gold pads. (© IEEE) |
| "In comparison with our group's previous assembly of 3-D silicon microstructures, MEMS device assembly requires more complex and fragile structures such as combs and suspended flexure beams to be fabricated as retrievable components on a donor substrate and to be subsequently transferred to a receiver substrate," Yong Zhang, the paper's first author, tells Nanowerk. |
| This new work is demonstrating the micro-masonry technique's capability of constructing 3-D microdevices that are impossible or difficult to realize with previous monolithic microfabrication. |
| "We envision the assembly of high-performance microscale weight sensors, microscanners, and vibration-driven energy harvesters in the future," says Kim. |
| Other opportunities include the exploration of similar assembly concepts with not only silicon but also other materials including metals, dielectrics, and polymers. |
| Kim notes that, like other pick-and-place assembly methods, the micro-masonry technique is performed serially. "Thus, we think micro-masonry is currently more appropriate for multi small batch rapid fabrication. To increase its manufacturing scalability, reel-to-reel process with multiple stamps can be adopted for continuous and parallel operation. In addition, automating the process is appealing since it will speed up the process and reduce manual work." |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
