| Posted: Oct 20, 2017 |
Acoustic microstreaming - using sound waves for microfluidic applications (w/video) |
| (Nanowerk Spotlight) Precise and reproducible manipulation of synthetic and biological microscale objects in complex environments is essential for many practical biochip and microfluidic applications. Such automated manipulation of microparticles requires new methods that offer simple, non-specific and long-lasting operation. |
| To date, commonly used manipulation methods rely on the use of optical tweezers, external magnetic fields, electrokinetic forces, hydrodynamic flows, and surface acoustic waves. Although these methods are quite useful for specific applications, they suffer from significant problems that warrant pursuing alternatives. For example, they usually face a trade-off between manipulating a single particle versus multiple particles; they may inflict irreversible damage to the sample and require particle modification or the use of expensive equipment, |
| Researchers at UC San Diego have now developed a new ultrasound-based method to guide microparticles in an autonomous and reproducible fashion, along with engineered topographical features – something like an automated highway system for microparticles. They report their findings in ACS Applied Materials & Interfaces ("Topographical manipulation of microparticles and cells with acoustic microstreaming"). |
| Researchers at the University of California, San Diego have developed a new tool to manipulate and guide microparticles using sound waves. This novel method relies on generating a localized trapping forces around an engineered microstructure. The speed and orientation of the traveling microparticles can be easily modulated by changing operating parameters. It can even be used to guide live cells though maze structures. |
| The speed and orientation of the traveling microparticles can be easily modulated by changing the applied ultrasound field. While previous methods have used streaming vortices to move or trap particles, they don't have the ability to move objects in regular trajectories, rather they move everything in bulk. |
| "The working principle relies on ultrasound-induced localized microstreaming forces generated around engineered solid microstructures, which are capable of trapping nearby micro objects and guiding them along the topographical structure," Fernando Soto, a Ph.D. nanoengineering student in Joseph Wang’s lab at UC San Diego tells Nanowerk. "Our method can be used to manipulate a single micro-object around simple topographical features, such as a post structure; as well for the collective manipulation of multiple objects moving synchronously along complex pathways, such as a maze structure." |
| This technique can even be used to guide living cells (cancer cells and red blood cells) through mazes. These cells can be guided and maneuvered around the complex topographical features presented in the maze structure, including but not limited to 90° corners (I), straight lines (II), line changes over non-connected walls (III) and 180° turnaround (IV) – just like the common operation you would find on the road while driving (I-IV refer to the figure below). |
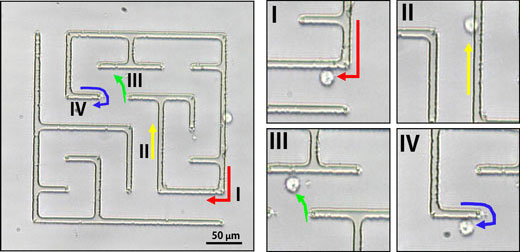 |
| Automated topographical guidance of colloidal particles through complex maze structures under acoustic microstreaming manipulation. (Image: Fernando Soto, UCSD) |
| This method could be used for many practical biochip and microfluidic applications. The most important achievement of the UCSD team's work is that they developed an autonomous navigation system for the nano/microworld – one that doesn't require external feedback, particle modification or adjustment of the operational parameter. |
| "This method can be expanded for many applications, for example, we can make a micro-rotor by making a micro-bead orbit around a circular post feature, if we have arrays with thousands of such micro rotors, this could achieve low volume chemical mixing," Soto notes. "Furthermore, we believe this method could be used for designing micro-assembly factories, moving different parts in production lines through the topographical features, and finally, this method could use to manipulate biological samples without the need for microfluidic systems and related pumping." |
| Actual footage of navigating a microparticle through a maze with sound waves. (Video: Fernando Soto, UCSD) |
| Going forward, the team is looking to push the limits of this manipulation method. They already have shown that they can manipulate particles regardless of their shape; now they are looking into parameters that could help them differentiate between particles with different properties. |
| They are also testing new topographical designs, as each pattern can produce different behaviors. The end goal is to have self-driving microparticles. |
| "The main challenge of this field relies on creating a universal tool that can manipulate any particle; a particular challenge is to create long-range interconnected networks of topographical features that can work together at fast operational speeds," concludes Soto. "This will require the fine tune operation and synchronization between the topographical features." |
 By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of four books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology (2009),
Nanotechnology: The Future is Tiny (2016),
Nanoengineering: The Skills and Tools Making Technology Invisible (2019), and
Waste not! How Nanotechnologies Can Increase Efficiencies Throughout Society (2025)
Copyright ©
Nanowerk LLC
|

Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
