| Posted: Nov 13, 2013 | |
Medical microrobots to deliver drugs on demand (w/video) |
|
| (Nanowerk Spotlight) Advances in micro- and nanoscale engineering in the medical field have led to the development of various robotic designs that one day will allow a new level of minimally invasive medicine. These micro- and nanorobots will be able to reach a targeted area, provide treatments and therapies for a desired duration, measure the effects and, at the conclusion of the treatment, be removed or degrade without causing adverse effects. Ideally, all these tasks would be automated but they could also be performed under the direct supervision and control of an external user. | |
| Several approaches have been explored for the wireless actuation of microrobots. Among these, magnetic fields have been the most widely employed strategy for propulsion because they do not require special environmental properties such as conductivity or transparency (see for instance: "Artificial nano swimmers", with a video that shows the controlled motions of particles in a magnetic field). This approach allows for the precise manipulation of magnetic objects toward specific locations, and magnetic fields are biocompatible even at relatively high field strengths (MRI). | |
| In a new work, a team of researchers from ETH Zurich and Harvard University (David Mooney's lab) demonstrate that additional intelligence – including sensing and actuation – can be instantiated in these microrobots by selecting appropriate materials and methods for the fabrication process. | |
| "Our work combines the design and fabrication of near infrared light (NIR) responsive hydrogel capsules and biocompatible magnetic microgels with a magnetic manipulation system to perform targeted drug and cell delivery tasks," Dr. Mahmut Selman Sakar, a research scientist in Bradley Nelson's Institute of Robotics and Intelligent Systems at ETH Zurich, tells Nanowerk. | |
| Reporting their results in the November 4, 2013 online edition of Advanced Materials ("An Integrated Microrobotic Platform for On-Demand, Targeted Therapeutic Interventions"), first-authored by Sakar's co-researcher Stefano Fusco, the team fabricated an untethered, self-folding, soft microrobotic platform, in which different functionalities are integrated to achieve targeted, on-demand delivery of biological agents. | |
 |
|
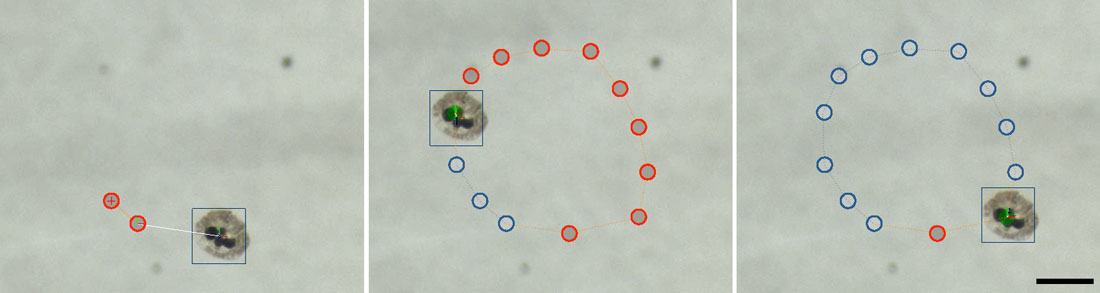
| Microrobot manipulation over a selected pattern. The robot follows the preplanned trajectory. Red circles denote target destinations and the circles turn into blue as the robot passes over them. (Image: Mahmut Selman Sakar, IRIS Lab) (click image to enlarge) | |
| As Sakar explains, the smart carriers, which are designed to be able to deliver biological materials, consists of two parts: | |
| 1) Thermo responsive hydrogel-Graphene oxide nanocomposite bilayers, resembling the shape of Jellyfish and Venus Flytrap | |
| Stimuli-responsive hydrogels are a class of materials closely resembling biological tissues in their physical and chemical properties. These swollen polymer networks are of interest in research and industry for many biomedical applications due to their unique capability of a reversible volume change in response to different stimuli (temperature, pH, ionic strength, etc.). They are used in tissue engineering, drug and cell delivery and wound healing. | |
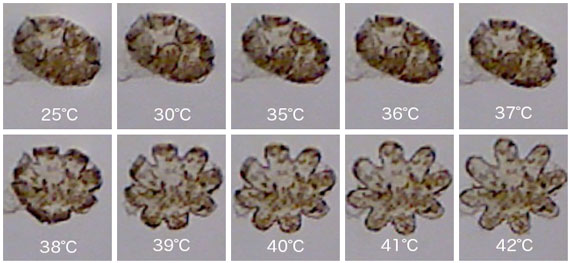
| Bilayered hydrogel structures fold when two coupled layers swell or contract differently in response to a specific chemical or physical change. The fabricated microstructures can switch from a closed to an open configuration when their body temperature exceeds 40?C. | |
| "More importantly" says Sakar, "we engineered these microstructures so that a short exposure to a NIR laser source generates the required heat within the target structure. In this way, an external operator can stimulate the microstructures from a certain distance." | |
| This source of actuation was chosen as a controllable trigger mechanism, because it can penetrate body tissue without causing damage even at repeated doses. This part is intended to provide an on demand drug delivery platform and to protect the internal environment from foreign body reactions. | |
 |
|
| Optical microscope images of temperature dependent unfolding of long venus flytrap-like hydrogel bilayers. The closed configuration at body temperature allows remote actuation in a physiological environment. (Image: Mahmut Selman Sakar, IRIS Lab) | |
| 2) Magnetic alginate microspheres | |
| These microparticles can be loaded with biological materials and can easily be encapsulated inside the hydrogel bilayers. Alginate, a natural biodegradable polysaccharide, is often chosen as a gelable polymer for long-term and sustained delivery of both drugs and cells. This part of the device allows external magnetic manipulation and sustained delivery. | |
| The number of beads trapped and their position and orientation varied depending on the shape of the structures and the size of the microbeads. Structures resembling Venus flytraps were able to encapsulate more beads along the dominant axis, while jellyfish-like structures folded into a spherical ball filled with uniformly distributed beads. The distribution influenced the magnetic properties of the final platform. In both cases, microbeads remained inside after complete closure of the hydrogel films and throughout the magnetic manipulation experiments. | |
| "These complex structures are manipulated in 3D complex spaces by means of a five-degree-of-freedom (5-DOF) electromagnetic manipulation system, which could potentially be integrated to commercial MRI setups," Sakar describes the automated locomotion of the microrobots. "The system provides precise positioning under closed-loop control with computer vision but can also be used with no visual tracking, relying only on visual feedback to the human operator during direct teleoperation." | |
| He points out that the team's magnetic manipulation system is capable of generating multiple types of state-of-the-art magnetic control techniques including field and gradient propulsion, rotating magnetic fields, and their combinations. | |
| Despite being developed as a prototype, the proposed microrobotic platform possesses all the required features that the researchers envision for biomedical applications including 3D automated magnetic steering; the capacity to carry drugs and cells; and spatiotemporally controlled delivery. | |
| Watch a video that shows magnetic microrobot manipulation over a selected pattern. The robot follows the preplanned trajectory indicated by the circles: | |
| The team employed a flexible and versatile fabrication technique to produce hydrogel-based soft microstructures. The fabrication methods of the self-folding devices are compatible with the production of smaller microcarriers made out of a variety of different materials. | |
| "With further developments, the released magnetic beads could be navigated to very small conduits in the body, allowing a modular approach to the problem of cell and drug delivery," says Sakar. | |
| He adds that, "although some of the individual pieces might have appeared in previous reports, for the first time, our study introduces a complete platform based on self-folding soft polymeric structures that can be used as wirelessly controllable microcarriers. We successfully combined magnetic navigation with light activated actuation on the same body." | |
| The researchers are confident that their unique synthesis and characterization of these biocompatible micro carriers will open up opportunities to perform on-demand, targeted therapeutic interventions. | |
 By
Michael
Berger
– Michael is author of three books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology,
Nanotechnology: The Future is Tiny, and
Nanoengineering: The Skills and Tools Making Technology Invisible
Copyright ©
Nanowerk LLC
By
Michael
Berger
– Michael is author of three books by the Royal Society of Chemistry:
Nano-Society: Pushing the Boundaries of Technology,
Nanotechnology: The Future is Tiny, and
Nanoengineering: The Skills and Tools Making Technology Invisible
Copyright ©
Nanowerk LLC
|
|
|
Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com. |
|